
Sensorización capacitiva para la vida cotidiana asistida por el entorno
Capacitive sensing for ambient assisted living (AAL)
RESUMEN
La sensorización capacitiva y especialmente la relacionada con aplicaciones táctiles, a pesar de existir desde la década de 1970, ha vivido una revolución en los últimos años con la proliferación de dispositivos táctiles. La tecnología de sensorización capacitiva ofrece los medios de interacción necesarios para mejorar la independencia de los usuarios con varios tipos de diversidad funcional, y este hecho se puede comprobar en emplazamientos experimentales como DecKubik.
Este entorno en el que se validan los nuevos productos desarrollados fruto de la I+D es una infraestructura única para la investigación y desarrollo de nuevos conceptos, productos y servicios para el mercado del envejecimiento activo de la población. Simula un apartamento con dos habitaciones, una sala de estar, cocina y baño. Los espacios están equipados con las infraestructuras necesarias y están preparados para ubicar nuevos productos, interfaces, sistemas de sensorización, servicios y tecnologías que necesitan ser testadas y validadas por los usuarios de vida cotidiana asistida por el entorno (Ambient Assisted Living [AAL]).
Este artículo aborda de manera práctica las características de la sensorización capacitiva y las funcionalidades que puede aportar de manera no intrusiva para el usuario. Así mismo, diserta sobre los futuros avances previstos en la tecnología táctil capacitiva.
Recibido: 6 de mayo de 2014
Aceptado: 1 de septiembre de 2014
Palabras clave
Envejecimiento, interactividad, accesibilidad, interfaz, capacitancia
ABSTRACT
Capacitive sensing and especially the one related to touch applications, even although it existed since 70s decade, has undergone a revolution in recent years with the growth of tactile gadgets. This sensing technology provides the means of interaction to improve user independence with some type of functional diversity been this tested at facilities like DecKubik.
DecKubik (where new products developed by means of R&D are validated) is a singular infrastructure for research and development of new concepts, products and services for the market of active aging. It simulates an apartment with two bedrooms, a living room, a kitchen and a bathroom. The spaces are equipped with the necessary infrastructure and they are ready to locate new products, interfaces, sensing systems, services and technologies that need to be tested and validated by users of assisted living environment (Ambient Assisted Living [AAL]).
This article deals in a practical way with the features of capacitive sensing and functionalities that it can provide non-intrusively to users. At the same time, it deals with future advances in the capacitive touch technology.
Received: May 6, 2014
Accepted: September 1, 2014
Keywords
Aging, interaction, accessibility, interface, capacitance
Introducción
Durante los últimos años, el envejecimiento de la población en nuestro país y en el entorno europeo está planteando nuevos retos a los diferentes sectores de la población involucrados. Una de las soluciones que está adquiriendo cada vez mayor importancia es la posibilidad de alargar el tiempo que una persona mayor puede permanecer de forma autónoma en su propia vivienda, sin renunciar a los beneficios que obtendría viviendo en una residencia, pero sin la problemática de tener que dejar su hogar y entorno conocido.
El planteamiento de envejecer en casa supone numerosos retos desde el punto de vista constructivo, tecnológico y de servicios. Este nuevo concepto implica numerosos cambios desde el punto de vista de la configuración de los espacios arquitectónicos y urbanos así como de los productos y sistemas que se utilizan en una vivienda. Asimismo, las tecnologías de apoyo y los servicios para que esto sea posible deben adaptarse o plantearse de nuevo teniendo en cuenta las necesidades del envejecimiento en el hogar (flexibilidad, facilidad de uso, coste reducido, etc.).
En este sentido, la tecnología de sensorización capacitiva analizada en este artículo ofrece un gran abanico de posibilidades tecnológicas que permiten mejorar la calidad de vida de los usuarios de sistemas asistenciales de manera no invasiva.
Laboratorio de Diseño Avanzado y Monitorizado de Máquinas (Disamm)
En 2010, según los datos de Eurostat, en la Unión Europea (EU-27) el porcentaje de personascon65o másañosalcanzó el17,4% de la población. En España, este porcentaje era en 2010 del 16,7% de la población.
Actualmente, el 16% de los ancianos se encuentran en una situación de dependencia y el 26% tienen algún tipo de diversidad funcional. Sin embargo, cabe notar que el 70% de las personas con más de 70 años dice preferir seguir viviendo en su hogar antes que ser internado en una residencia.
Todo esto nos indica que se necesita avanzar en la investigación de nuevas soluciones tecnológicas para cubrir la creciente demanda de asistencia en hogares y ser capaces de llegar con los frutos de la investigación a productos en el mercado, entre otras en las siguientes vertientes en las que la tecnología capacitiva puede tener un papel importante:
– Equipamiento: Desarrollos encaminados a crear nuevos elementos de mobiliario inteligente que interactúan con el usuario, cuyo comportamiento pueda facilitar su utilización por parte de los colectivos más vulnerables (personas mayores, personas con diversidad funcional, etc.) tanto a nivel de interior como a nivel urbano.
– Tecnologías de la información y comunicación: Verificación de las prestaciones de tecnologías de asistencia integradas en la vivienda. Modelos de comportamiento a partir de seguimiento mediante sensores de la actividad desarrollada y control de patrones de actividad, así como elementos de entretenimiento accesibles y estimulantes para todos.
La tecnología de detección capacitiva
La capacidad eléctrica es la propiedad que tienen los cuerpos paramantenerunacarga eléctrica.Nuestropropiocuerpoposee esta propiedad, razón por la cual ciertos sensores pueden detectar si tocamos un objeto e incluso el modo en el que lo hacemos.
Existen numerosos métodos para medir la capacitancia: el oscilador de relajación, la transferenciade carga,laaproximación sucesiva (SAR), la modulación de frecuencia, el desplazamiento de la frecuencia de resonancia, la modulación de amplitud, carga frentea la medicióndeltiempo, la medición de retardo, etc.
La mayoría de los métodos requieren circuitos analógicos y heredan los problemas relacionados como las interferencias, el acoplamiento y la sensibilidad al ruido electromagnético. Un enfoque digital requiere menos superficie de contacto, pero consume mucha energía, en comparación con las soluciones analógicas.
Como ejemplo de un método digital, un circuito tipo mide la diferencia entre una referencia y el condensador de carga para evaluarla. Este método fue desarrollado por AtLAB, Inc., de Corea del Sur (Moon et al, 2006).
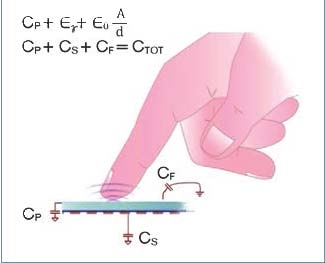
Si tomamos una pista de circuito impreso y un dedo humano (el cuerpo humanoestácompuestoaproximadamente en el 65% de agua) con los dos elementos conductores y el aire como dieléctrico, la forma en que funciona un sensor táctil capacitivo se ve claramente a partir de la ecuación para calcular la capacitancia en la figura 2: un dedo al acercarse a la pista de circuito impreso disminuye la distancia (d) entre los dos elementos conductores, aumentando así la capacitancia (C).
En una aplicación de sensorización táctil, la capacitancia a detectar CF cambiará dependiendo del contacto del dedo, mientras que la referencia CS es estática (despreciando la variacióndetemperatura, etc.). Un toque se detecta si CF cambia desde un mínimo (CF1 = C0) a un valor más alto (CF2 = C0 + CF) en un corto espacio de tiempo. Con el fin de evitar falsas detecciones, el aumento de la CTOT debe exceder de un cierto umbral, llamado α(figura 2).
En el caso más simple, el circuito sensor detecta solo un toque y realiza una decisión sí / no a la salida. Para los elementos más sofisticados, como barras deslizantes (slider bar), con resoluciones más altas, la fuerza de contacto, es decir, la cantidad de CP ha de evaluarse también. En un diseño deslizante lineal, varias pastillas de sensores están situadas cerca una de la otra. Al tocar el sensor deslizante, más de una pastilla está influida por el dedo. Dependiendo del tamaño de las pastillas y el diseño, la resolución de un cursor puede ser tan alta como 100 pasos por canal de interpolación.
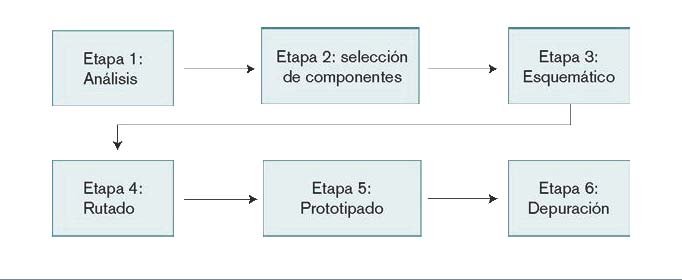
Diseño y desarrollo electrónico
Análisis.
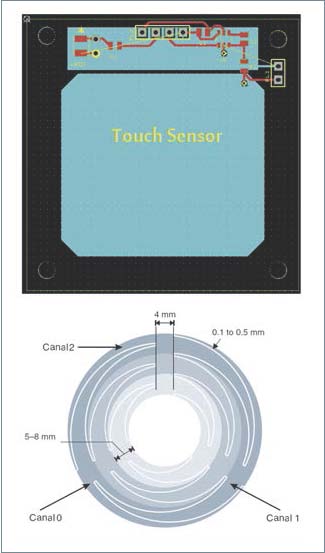
Los sensores capacitivos están construidos a partir dediferentesmateriales, talescomo cobre, óxido de indio, estaño y tinta impresa. Los sensores capacitivos de cobre pueden ser implementados en PCB tipo FR4, así como en material flexible. El ITO (Indium Tin Oxide) permite que el sensor capacitivo pueda tener una transparencia de hasta el 90%. En la figura 3, se pueden apreciar las soluciones más sencillas de sensorización táctil capacitiva, y los métodos descritos posteriormente son más complejos. En la fase de diseño y desarrollo electrónico de elementos de sensorización capacitivos, hay varios aspectos que se deben tener en cuenta. A continuación, se describen los más relevantes (figura 4).
Selección de componentes.
Existe una amplia variedad de soluciones integradas que solamente requieren unos cuantos componentes discretos adicionales como: AT42QT1010 de Atmel, MPR121QR2 de freescale o la gama mTouch de Microchip.
Esquemático y rutado, (tamaño del sustrato del sensor).
La forma del sustrato del sensor reviste importancia para un sensor capacitivo, así como elárea delsustrato determina su sensibilidad. El áreadeberíaserdel tamaño promedio de la huella del contacto de un dedo (15 x 15 mm aproximadamente), pero si el tamañodel sustratodel sensores mayorque el óptimo, la capacitancia parásita puede verse incrementada.
Esquemático y rutado, (longitud de la pista del circuito impreso).
La longitud de la pista entre el sensor y el controlador puede crear una mayor susceptibilidad a las capacitancias parásitas si es excesivamente larga. Esto podría cambiar la resistencia de la pista y afectar a la sensibilidad. La longitud de la pista no debería exceder de 300 mm. La capacitancia de un dedo transmitida al sensor está determinada por el tipo de material de recubrimiento usado y por su espesor. El material de recubrimiento debe poseer una elevada constantedieléctrica (vidrio 5-10, porcelana 7,papel 6, etcétera) para incrementar la sensibilidad y ser lo más fino posible.Si el espesor del recubrimiento aumenta, la interferencia o crosstalk entre los sensores se incrementa también.
Prototipado, (selección del adhesivo).
El adhesivofijael material de recubrimiento al circuito impreso y se deberá aplicar en forma de capa fina para conseguir una alta sensibilidad y un buen acoplamiento evitando burbujas de aire.
Prototipado, (separación entre sensores).
Cuando setoca unsensor, eldedo introduce una capacitancia adicional, no solo en un sensor sino también en los próximos. Por lo tanto, para aislar la capacitancia del dedo hayque mantenerun espacioentre los sensores adyacentes. La separación ideal es de 2 a 3 veces el espesor del material de recubrimiento del sensor de detección táctil capacitivo.
Depuración.
La principal fuente de error en las mediciones de capacitancia es la capacitancia parásita, que de no ser vigilada, puede fluctuar. La capacitancia parásita puede ser considerada relativamente constante al proteger la señal de capacitancia y conectar el apantallamiento a la referencia de tierra. Además, para reducir al mínimo los efectos no deseados de la capacitancia parásita, es una buena práctica situar la electrónica de deteccióntancerca como sea posibledelos electrodos del sensor.
Resultados
A continuación se mostrarán casos de aplicación en proyectos de I+D en los que entre otras tecnologías se ha aplicado la sensorización capacitiva y el escenario para su demostración en un edificio experimental.
Lainfraestructuraexperimental descrita consiste en un edificio con 500 m2 distribuidos en un sótano, una planta baja y dos plantas superiores; las principales dimensiones son 10,00 m de ancho x 10,00 m de alto (más el sótano con una profundidad de 3 m). Kubik tiene un avanzado sistema de monitorización equipado con más de 400 sensores que recogen las condiciones en el interioryexteriordel edificio.Investigadores y usuarios tienen acceso vía Internet a las mediciones que se realizan en el escenario en el que el comportamiento y usabilidad de los productos y sistemas en desarrollo son evaluados.
Es importante resaltar la contribución de DecKubik a las actividades relacionadas con el desarrollo de nuevos productos para el envejecimiento. Actualmente, el desarrollo técnicode un productocomienzacon el análisis numérico y simulación del producto, el cual se lleva a cabo en un escenario virtual. El producto es entonces testado en laboratorio de acuerdo con las normas de ensayo vigentes y finalmente se lanza al mercado. DecKubik ofrece un paso intermedio que permite evaluar elcomportamiento del producto en condiciones realistas y por usuarios reales (Open building). Esto acelera el proceso de desarrollo y reduce el riesgo de un funcionamiento deficiente de productos altamente innovadores que carecen de experiencia previa en el mercado.
Un edificio inteligente se refiere aaquellos que hacen uso de toda clase de tecnologías para hacer más eficiente su uso y control. Estas tecnologías abarcan principalmente cuatro categorías: seguridad, comunicaciones, apoyo logístico y automatización de procesos. Cabe destacar como principales aportaciones de la tecnología capacitiva:
Mobiliario interactivo
En el marco del proyecto WoodTouch (Drury, 2013;Arakistain,2013),hemos desarrollado unnuevo concepto deinteraccióntáctilcon el mobiliario y las superficies de madera. Este concepto puede ser utilizado para aportar mayor inteligencia al mobiliario que nos rodea.
El sistemade sensorización hace usodel tacto agradable de la madera para convertir el mobiliario en el nuevo centro de control y, por tanto, poder tener bajo nuestro control los dispositivos eléctricos de nuestro hogar de una manera sencilla e intuitiva. La colaboración en el proyecto de investigación ha permitido crear una nueva relación con el mobiliario dehogar enla queel este adquiere nuevas funcionalidades.
Se puede emplear para controlar la iluminación de una estancia, activar la calefaccióny regular la intensidad de varios dispositivos eléctricos enchufados sin la necesidad de pulsar un botón.
La innovadora idea que hemos desarrollado y testado busca suplir la creciente demanda de interfaces sencillas con las que interactuar con los dispositivos eléctricos delhogar. Elproyecto pretendeprobar que el mobiliario, además de ser un elemento decorativo y de soporte, puede proporcionar funcionalidades adicionales.
Sistema de control de patrones de actividad
Tras tres años de investigaciones, se ha creado un prototipo del sistema de control de patrones en Zamudio (Vizcaya). Este sistema, a través de una amplia red de sensores distribuidos por la vivienda (la tecnología capacitiva es una de las utilizadas), es capaz de detectar la presencia del usuario en diferentes habitaciones,la abertura y cierre de ventanas, puertas, cajones, el encendido y apagado de luces, el empleo de electrodomésticos, de la televisión, la estancia en el sofá, en la cama, el uso de grifos, etc.
El dispositivoregistra,en tiemporeal,la información de los sensores e identifica la actividad que la persona está realizando, como ver la telesentado enelsofá, preparar la comida o darse una ducha. Esta monitorización permite aprender los hábitos o rutinas de la persona, para posteriormente poder detectar los cambios que pueden ser indicativos de desorientación espacial, problemas o trastornos de memoria, desorientación temporal, abandono deactividad o aislamiento, síntomas en muchos casos de una enfermedad neurodegenerativa.
Así, sepuedealertar o informar deello al cuidador. Por ejemplo, pueden detectarse cambios en los patrones de sueño, en los hábitos de comida como dejar de comer caliente, deambulación errante en la vivienda, inactividad al pasar más tiempo sentado o viendo la televisión, etc.
Interfaces sencillas para el entretenimiento
El entretenimientotambién es parte importante de la vida y llamativas iniciativas como la del reproductorde música Itree, que incorpora tecnología de interacción táctil, son muestra de ello. Permite seleccionar la canción que reproducir y regular el volumen tocando sobre la superficie de madera.
Equipamiento urbano interactivo
Pero la aportación de la tecnología capacitiva no se limita al interior de los edificios; también el equipamiento urbano ofrece posibilidades en facetas como el Panel interactivo WoodTalk.
El WoodTalk es un elemento de cartelería urbana de madera con un marcado carácter tecnológico y de accesibilidad. Hace uso de la tecnología táctil capacitiva e interacciona por voz con el usuario proporcionándole información acerca del entorno en varios idiomas (información turística, distancia entre dos puntos pulsados, marketing de proximidad para establecimientos comerciales, etc.). Además, es energéticamente autosuficiente gracias a unas células fotovoltaicas situadas en el frontal,porloque no precisa de cableado.
Futuros avances de la tecnología y su aplicación
Lanovedosatécnicade barridode frecuencia capacitiva (Harrison, 2012) no solo puede detectar un evento de toque, sino al mismo tiempo reconoce configuraciones complejas de las manos y el cuerpo durante la interacción táctil. Esto permite mejorar significativamente la interacción táctil en una amplia gama de aplicaciones, desde la mejora de las pantallas táctiles convencionales hasta el diseño de escenarios de interacción para contextos de uso exclusivo.
En la actualidad, las pantallas táctiles pueden diferenciar varios puntos de contacto simultáneo (pantallas multitáctiles), pero no quién toca el dispositivo. Las propiedades eléctricas de los seres humanos y su atuendo pueden ser utilizados en un futuro próximo para apoyar la diferenciación de usuarios en superficies táctiles capacitivas (Sato, 2012).
La técnica de detección de vibración electrostática mide la impedancia de un usuario con el medio, mediante el barrido de frecuencias de corriente alterna. La medición de la capacitancia mediante el contacto humano depende de una variedad de factores. Se ve afectada por cómo toca el electrodo la persona, o por el área de contacto de la piel con el electrodo. Se ve afectado también por la conexión del cuerpo a tierra, por el uso o no de zapatos o por tener uno o ambos pies en el suelo. Por último, depende en gran medida de la frecuencia de la señal.
Esto se debe a que a diferentes frecuencias, la señal de CA fluirá a través de diferentes caminos en el interior del cuerpo. De hecho,tal como una señal de CCfluye a través del camino con menor resistencia, la señal de CA siempre fluirá a través del camino con menor impedancia. El cuerpo humano es anatómicamentecomplejo y está compuesto por diferentes tejidos como músculo, grasa y huesos, que tienen diferentes propiedades resistivas y capacitivas. A medida que la frecuencia de la señal cambia, ciertos tejidos se oponen más al flujo de la corriente. Así, la trayectoria del flujo de corriente cambia.







Por lo tanto, mediante el barrido de una gama defrecuencias, seobtieneuna gran cantidad deinformaciónacerca de1) elmodo en que el usuario está en contacto con el objeto, 2) cómo el usuario está conectado a la tierra y 3) la configuración actual del cuerpo y sus propiedades individuales.
El reto es capturar de forma fiable los datos y luego encontrar patrones estáticos y temporales que permitan a un sistema interactivo inferir la interacción del usuario con el objeto. Esto requiere mucha más capacidad de cálculo para el análisis de datos que los métodos tradicionales.
Por otro lado, nuestro cerebro percibela rugosidad 3D sobre una superficie en su mayor parte por la información que recibe a través de la vibración de la piel. Por tanto, si somos capaces de producir una vibración en un dedo mientras se desliza por una superficie táctil, el cerebro se deja engañar y piensa en una rugosidad real a pesar de que la superficie de contacto es completamente lisa. Mediante la creación de lo que se llama un modelo psicofísico (una especie de mapa de sensación háptica), Disney ha sido capaz de indexar el voltaje de la vibración para crear una fuerza de fricción percibida, dando a su algoritmo de granularidad suficiente precisión para “generar la fuerza de fricción deseada entreeldedo delusuario y la superficie” de vídeo a las imágenes a los mapas topográficos (profundidad y elevación) y simular prácticamente cualquier combina-ción de cantos, bordes, salientes y protuberancias (Bau, 2012).
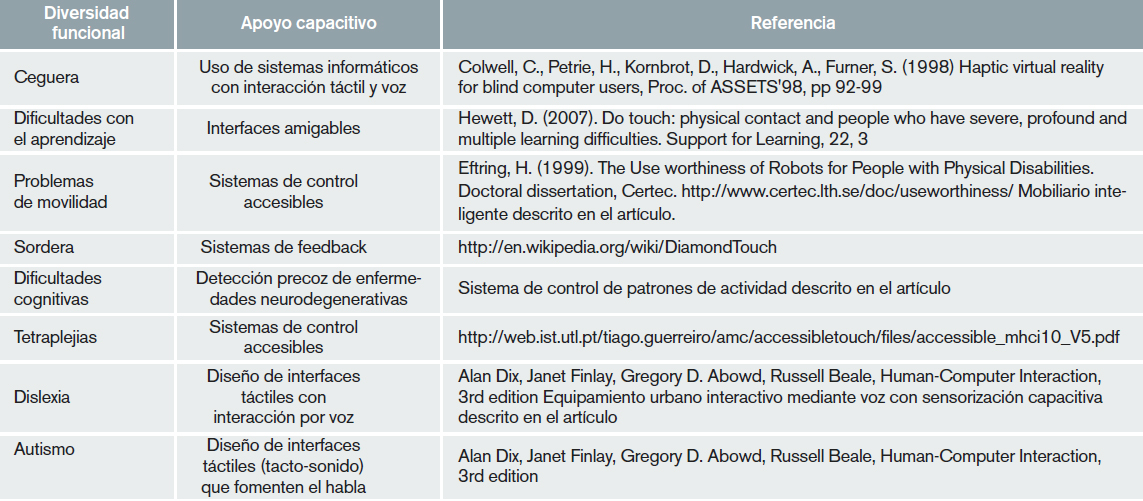
Estas tecnologías pueden aportar grandes beneficios a las personas con diversidad funcional como se describe en la tabla 1.
Conclusiones
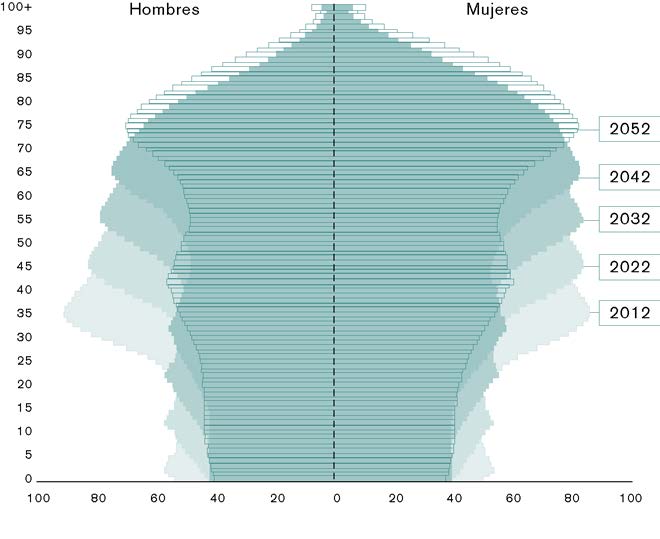
Para elaño 2050, unos 135 millones de personas en la UE-27 tendrán más de 65 años. Sin embargo, el desarrollo de productos y servicios innovadores sufren un mercado fragmentado y heterogéneo, una falta denormativa europea para productos basados en las tecnologías de la información y, frecuentemente, la falta de una política nacional de apoyo clara.
Uno de los objetivos finales de esta iniciativa es mostrar el potencial de las tecnologías de sensorización capacitivaparacrear entornos adaptables y accesibles para las personasquehabitanenellas. Mientrasque los espacios públicos deben ser accesibles, los espacios privados (tales como el hogar) deben adaptarse a las necesidades actuales de sus habitantes, por lo que deben de ser adaptables.
Para beneficiarse por completo de las tecnologías, los miembros de la UE necesitan mejores planes de validación y explotación deproductos. La infraestructura DecKubik tiene comoobjetivocubrirel huecoexistente entre la investigación y el mercado.
Bibliografía
Arakistain, I., Barrado, M. (2013). WoodTouch, a new interaction interface for wooden furniture. arXiv pre-print. http://arxiv.org/abs/1307.0951 Consultado el 18 de marzo de 2014.
Bau, O y Poupyrev, I. (2012). Tactile feedback technology for augmented reality. ACM Transactions on Graphics (TOG), 31, 4 (2012), 89.
Colwell, C., Petrie, H., Kornbrot, D., Hardwick, A., Furner, S. (1998) Haptic virtual reality for blind computer users, Proc. of ASSETS ’98, pp 92-99.
Cutkosky, M.R., Howe, R.D. (1990). Human Grasp Choice and Robotic Grasp Analysis, Dextrous Robot Hands, S.T. Venkataraman and T. Iberall, Ed. Springer-Verlag, New York.
Design Museum, editor: Peto, J. (1999) Design: Process, Progress, Practice, Published by the Desing Museum, London, UK. ISBN 1-872005-40-3.
Drury, J. (2013). “Smart’ furniture heralds a future with light touch”. Reuters. Disponible en: http://in.reuters.com/video/2013/01/21/smart-furniture-heralds-a-future-with-li?videoId=240633420 Consultado el 18 de marzo de 2014.
Eurostat. Disponible en: http://epp.eurostat.ec.europa.eu Consultado el 18 de marzo de 2014.
Eftring, H. (1999). The Useworthiness of Robots for People with Physical Disabilities. Doctoral dissertation, Certec. http://www.certec.lth.se/doc/useworthiness/
Fritz, J. P., Barner, K. E. (1999). Design of a Haptic Visualization System for People with Visual Impairments, IEEE Transactions on rehabilitation engineering, vol 7, No 3, p 372-384.
Fritz, J., Barner, K. (1996) Design of a haptic graphing method. Proc of RESNA ’96 Annual Conference, Salt Lake City UT. p 158-160.
Harrison, C., Sato, M., Poupyrev, I. (2012). Capacitive Fingerprinting: Exploring User Differentiation by Sensing Electrical Properties of the Human Body. In Proceedings of ACM UIST.
Instituto Nacional de Estadística. Disponible en: http://www.ine.es/ Consultado el 18 de marzo de 2014.
Moon, B. et Al. (2006). ATLab Inc. Yong-In City. Solid-StateCircuits Conference. ASSCC 2006. IEEE Asian. p. 247-250. ISBN: 0-7803-9734-7. Open building in Education. (2006). Open House Inter-national Journal, vol. 31 nº 2.
Sato, M., Poupyrev, I, and Harrison, C. (2012). Touché: Enhancing Touch Interaction on Humans, Screens, Liquids, and Everyday Objects. In Proceedings of CHI’12. ACM.
Sterman, John D. (2000). Business Dynamics: Systems thinking and modeling for a complex world. McGraw Hill. ISBN 0-07-231135-5.
Schaffernicht, Martin (2008). Indagación de situaciones complejas mediante la dinámica de sistemas. Edito-rial Universidad de Talca. ISBN 978-956-7059-93-5.