Desde sus inicios en los años 40, el tren Talgo ha utilizado diversas tecnologías no convencionales, que han configurado una marca claramente diferenciada.
Miguel Sánchez, David Abellán, Manuel García, José Carlos Miguel y José Luis López
1. Introducción: Una pequeña revisión histórica
Este artículo comienza con una breve descripción de dichas tecnologías incorporadas por los trenes Talgo, a través de un repaso histórico de su desarrollo a lo largo del siglo XX. Este breve repaso servirá de introducción para profundizar en el estudio de las ventajas y posibilidades de optimización que ofrece el sistema de rodadura de Talgo.
1.1 El tren articulado: el “guiado triangular”
A finales de los años 30, el aligeramiento y el aumento de velocidad de los trenes de pasajeros empezaron a incrementar la inestabilidad y el peligro de descarrilamiento. Para evitar estos riesgos, el ingeniero español Alejandro Goicoechea ideó un concepto de composición articulada continua, como alternativa a los tradicionales coches con cajas independientes montadas sobre bogies. La supresión de los bogies permitiría, por un lado, bajar considerablemente el centro de gravedad, aumentando la estabilidad en las curvas. Por otro lado, la conexión continua entre coches mejoraría el comportamiento en caso de descarrilamiento, evitando el vuelco entre coches, o la posibilidad de descarrilamiento y vuelco de cada coche individual.
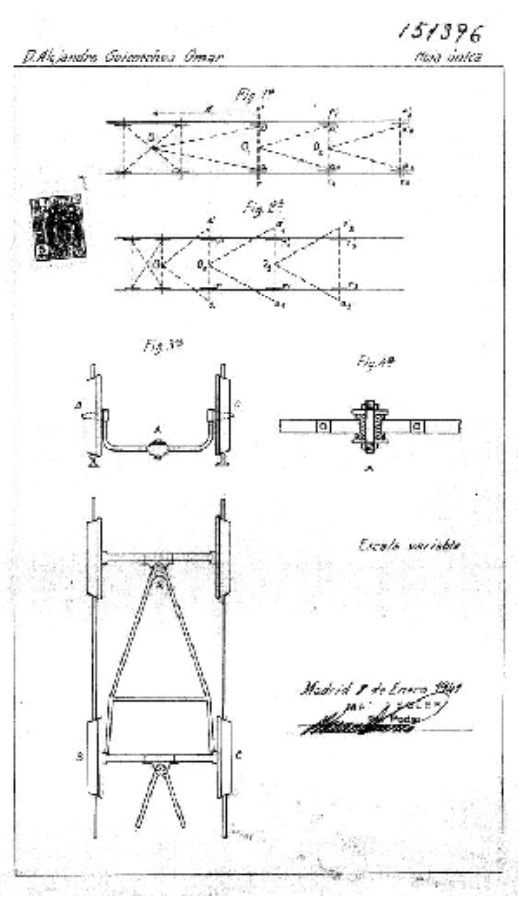
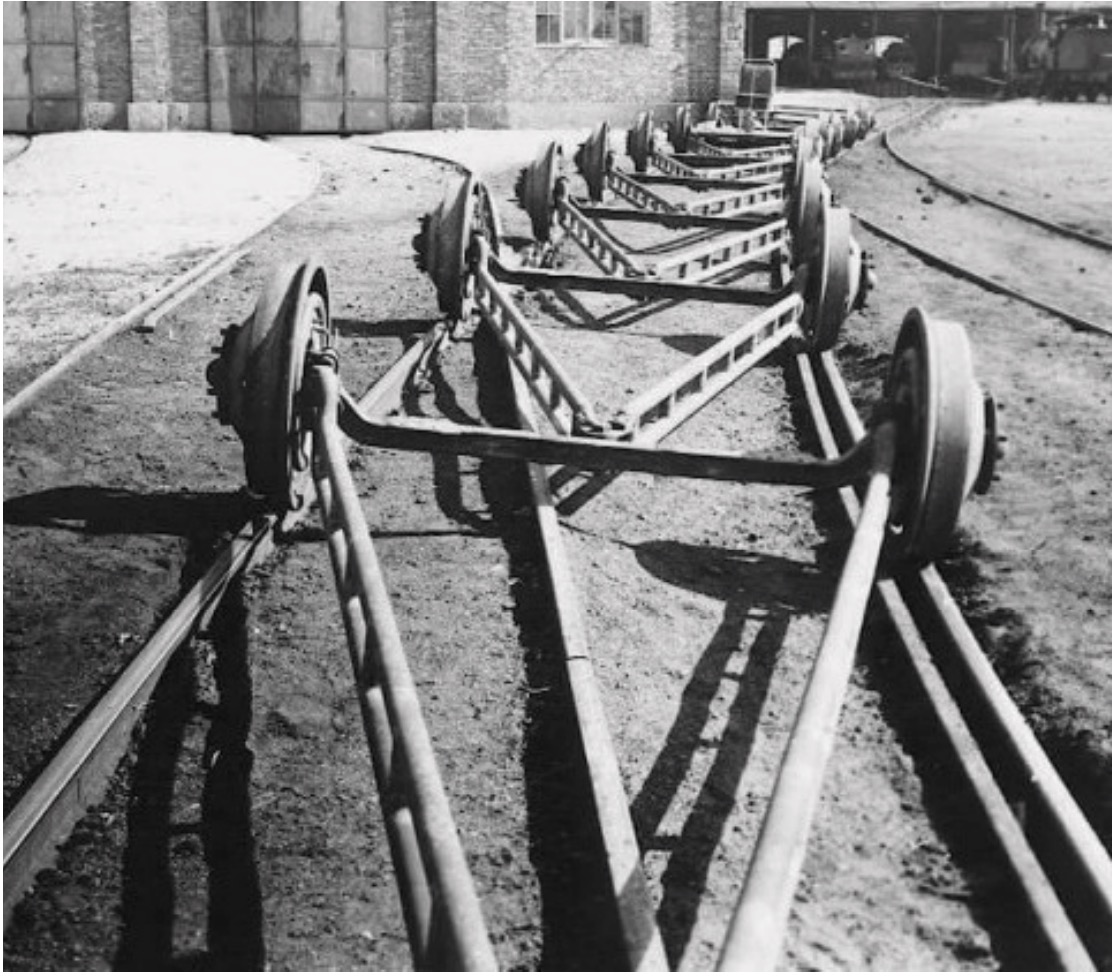
En la estructura articulada propuesta, cada eslabón de la composición está formado por una estructura triangular ligera y sencilla, con un solo eje en la parte trasera, y cuyo vértice delantero descansa a modo de remolque sobre un punto de articulación situado en el centro del eje del triángulo inmediatamente anterior. De este modo, la dirección marcada por el primer triángulo es seguida por los demás, que siguen la misma trayectoria sin necesidad de ninguna guía adicional. La figura 1 muestra un primer prototipo realizado en 1940 para probar la viabilidad de la configuración propuesta. La invención está amparada por la patente “Sistema combinado de articulación ligera para la organización de trenes en itinerarios guiados”, mostrada en la figura 2, que fue presentada en 1941 tras el paréntesis obligado por la Guerra Civil española.
Aplicando esta sencilla configuración, el guiado ya no se produce por el contacto con los carriles de las ruedas de perfil cónico montadas sobre ejes rígidos, por lo que se elimina el conocido movimiento de guiñada. La propuesta de Goicoechea evita los movimientos transversales de los ejes, que a altas velocidades pueden provocar vibraciones, molestias y, en última instancia, descarrilamientos. Además, se reduce el peso del conjunto de ruedas y se obtiene un aumento de la velocidad crítica del vehículo.
1.2 La rueda libre independiente
Con el concepto desarrollado, las ruedas interior y exterior tienen que girar a velocidades diferentes en curva, lo que impide el montaje sobre un eje rígido y obliga a adoptar la rodadura libre e independiente de cada rueda. Este hecho, lejos de ser un inconveniente, debe considerarse una ventaja. La supresión del eje físico, junto con la eliminación de los bogies o trenes de rodaje, permite situar el piso de los autocares a un nivel muy bajo y, por tanto, un descenso significativo del centro de gravedad, lo que aumenta la estabilidad e incrementará la velocidad en curva. Además, este piso bajo puede mantenerse en el espacio entre las ruedas, lo que permite tanto el acceso de los pasajeros al tren como el paso entre coches a este nivel.
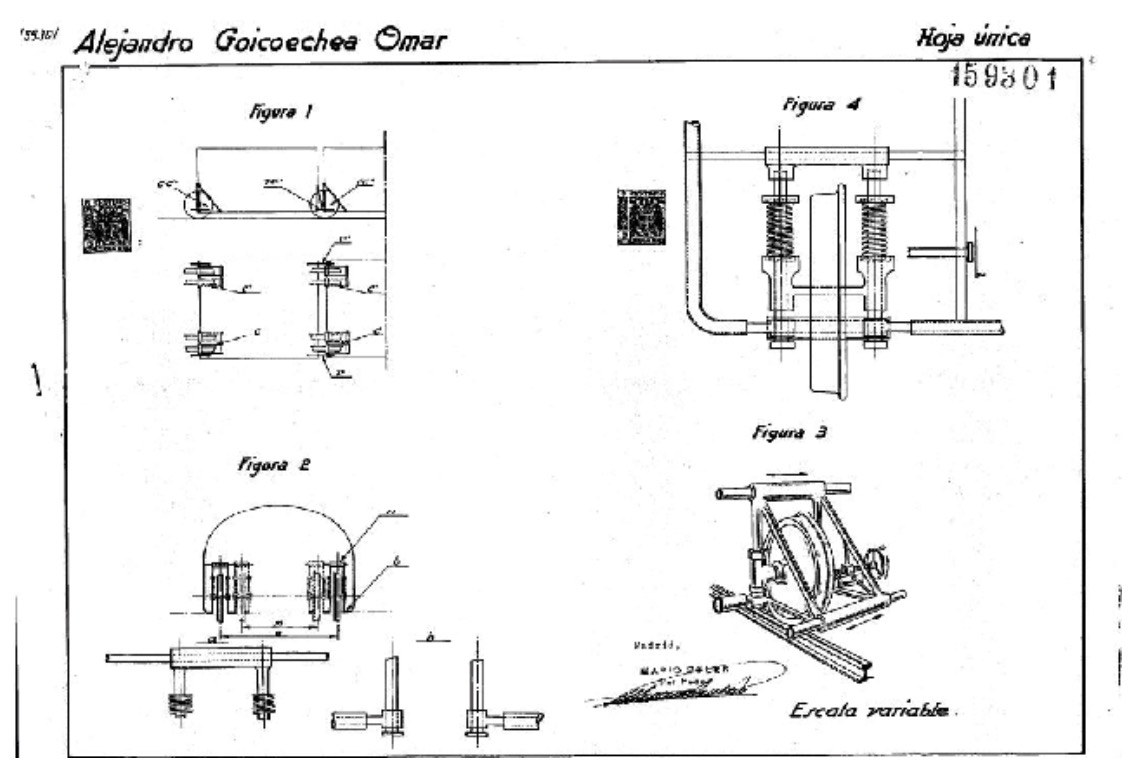
Los detalles asociados a la adopción de la rueda libre se recogen en la siguiente patente presentada por Goicoechea en 1942, que incluía también la posibilidad de desplazamiento transversal de las ruedas, para adaptarse a diferentes anchos de vía (ver figura 3).
A partir de octubre de 1942, la empresa Patentes Talgo comenzó a desarrollar estas ideas, y el primer resultado fue la realización del prototipo denominado Talgo I (figura 4).
1.3 El sistema de guiado reversible
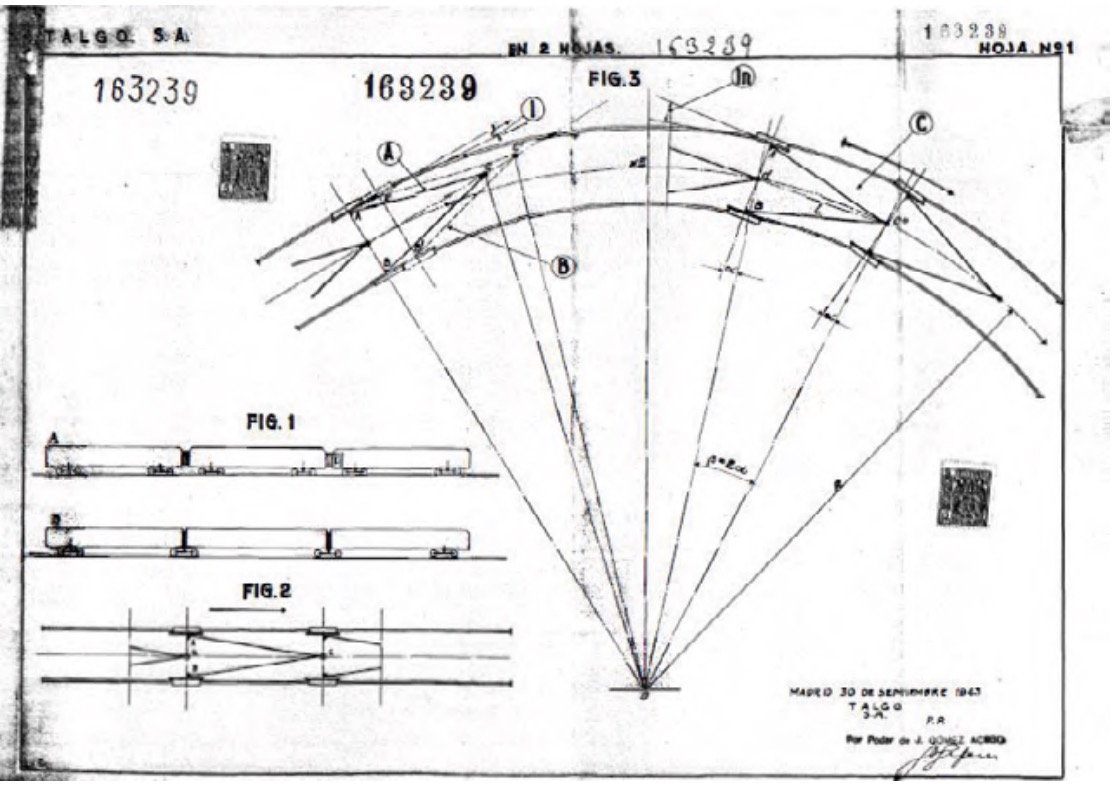
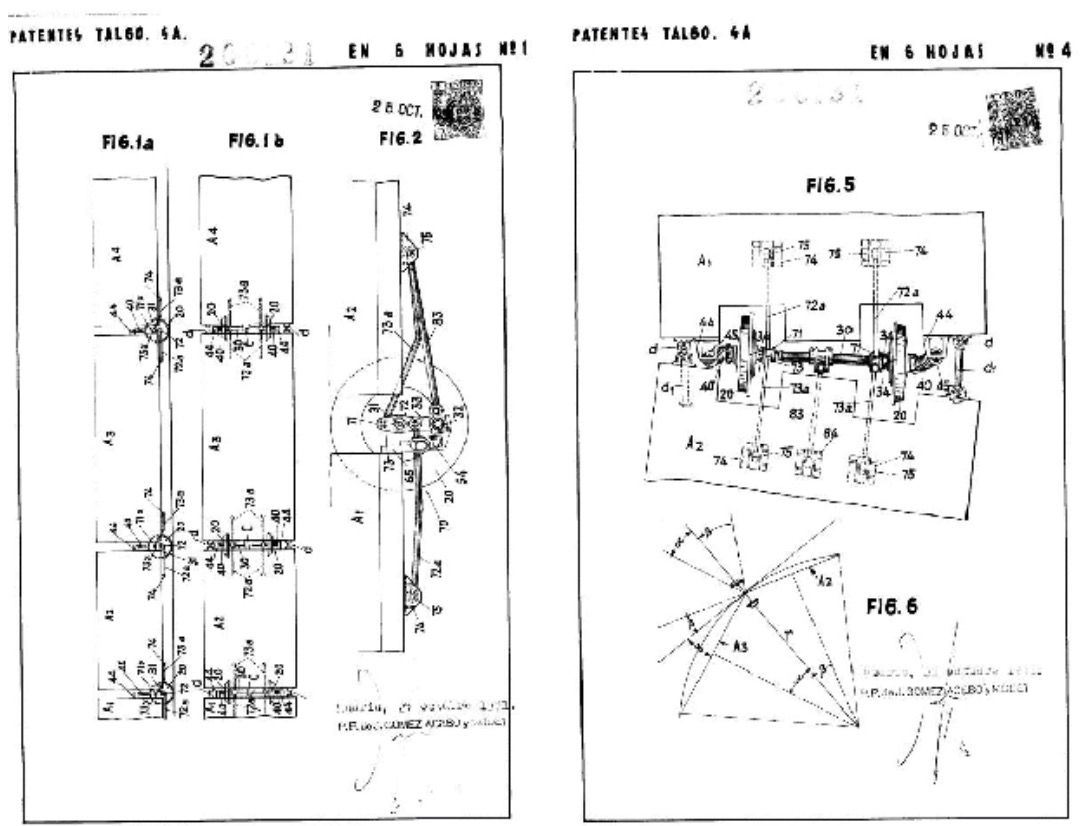
El sistema de guiado triangular simple propuesto por Goicoechea presentaba dos problemas principales. Por un lado, la conexión rígida de las ruedas en la parte trasera de cada coche hace que el eje virtual que las une esté orientado en una dirección que no pasa exactamente por el centro de la trayectoria. Por tanto, las ruedas no permanecen tangentes a los raíles, sino que tienen un ángulo de ataque negativo hacia el interior de la curva. Este efecto puede apreciarse en el croquis incluido en la primera patente solicitada por Talgo para el sistema de guiado en 1943, que se muestra en la figura 5. Para evitar alcanzar ángulos de ataque excesivamente elevados, era necesario limitar la longitud de los elementos triangulares, y por tanto de los entrenadores, lo que a priori no parecía representar un problema excesivamente grave al tratarse de una composición continua.
Este ángulo de ataque negativo en las curvas suele provocar que la pestaña de la rueda exterior se apoye en la parte trasera del contacto rueda-carril, lo que provoca un desgaste adicional del material. Sin embargo, este contacto en la parte trasera hace que aparezca una fuerza de fricción vertical descendente en la pestaña, que empuja la rueda contra el carril, oponiéndose al descarrilamiento.
Pero el gran problema del sistema de guiado triangular era su irreversibilidad. De hecho, el autoguiado estable de la composición articulada, y el efecto antidescarrilamiento descrito anteriormente, sólo se producen cuando se tira hacia delante. El sentido de marcha inverso hace que el ángulo de ataque de las ruedas curvas sea positivo, hacia el exterior de la curva. De este modo, la pestaña de la rueda exterior entra en contacto con el carril por la parte delantera, y la fuerza de rozamiento generada empuja la rueda hacia arriba, de modo que tiende a subir por el carril, pudiendo producirse el descarrilamiento a velocidades moderadas. La marcha atrás sólo es admisible para maniobrar a baja velocidad. Por lo tanto, invertir la marcha del tren exige dar la vuelta a toda la composición, lo que puede suponer un grave inconveniente desde el punto de vista de la futura explotación.

Desde las primeras pruebas con el Talgo I, se empezó a plantear la necesidad de mejorar el sistema de guiado. La inminente desaparición de las locomotoras de vapor, también irreversible, llevaría a suprimir los “triángulos” (vías de maniobra diseñadas para poder dar la vuelta a los trenes) de las estaciones. Tras las dificultades encontradas para vender el Talgo II (primer modelo comercial) debido a este hecho, la dirección de la empresa, vio la necesidad de hacer el tren reversible.
En consecuencia, a principios de los años 50, se publicaron varias patentes que proponían mecanismos destinados a permitir el guiado reversible. La primera de ellas, “sistema de guiado por pares de ruedas”, describe un sistema sencillo para el guiado por ejes. Como puede verse en la figura 6, presenta similitudes con el mecanismo Watt, utilizado en las suspensiones de los automóviles, y consigue un ángulo de ataque casi nulo de las ruedas, de forma que éstas se orientan tangencialmente al carril.
Este tipo de mecanismo, que por fin permitía un guiado reversible, se aplicó por primera vez en el Talgo III (figura 7), que empezó a funcionar comercialmente en 1964. El sistema desarrollado entonces, con las lógicas optimizaciones de diseño, es en el que se sigue basando hoy en día el mecanismo de guiado de los trenes Talgo actuales.
2. El mecanismo de rodadura de los trenes Talgo actuales
Todas las tecnologías disruptivas desarrolladas por Talgo a lo largo del siglo XX, se combinaron con éxito para desarrollar el primer tren de alta velocidad de la compañía, el Talgo 350, en servicio desde el año 2000. El buen comportamiento dinámico de estos trenes ha sido estudiado y optimizado, y los resultados pueden encontrarse en diferentes publicaciones. Y la evolución de la tecnología sigue implementándose en el AVRIL, el último modelo que saldrá al mercado de forma inminente.
El sistema de guiado es esencialmente el mismo que el incorporado en los trenes anteriores. Sin embargo, la puesta a punto se abordó mediante un sistema de control activo que actúa sobre el mecanismo de guiado de cada eje. Basándose en la comparación de las velocidades de giro medidas en cada rueda, el sistema es capaz de detectar pequeñas desviaciones en la trayectoria, que son corregidas en tiempo real, actuando sobre la longitud de determinadas barras del mecanismo. De esta forma, se asegura en todo momento el ángulo de ataque cero de las ruedas, minimizando pérdidas, rozamientos y vibraciones no deseadas.
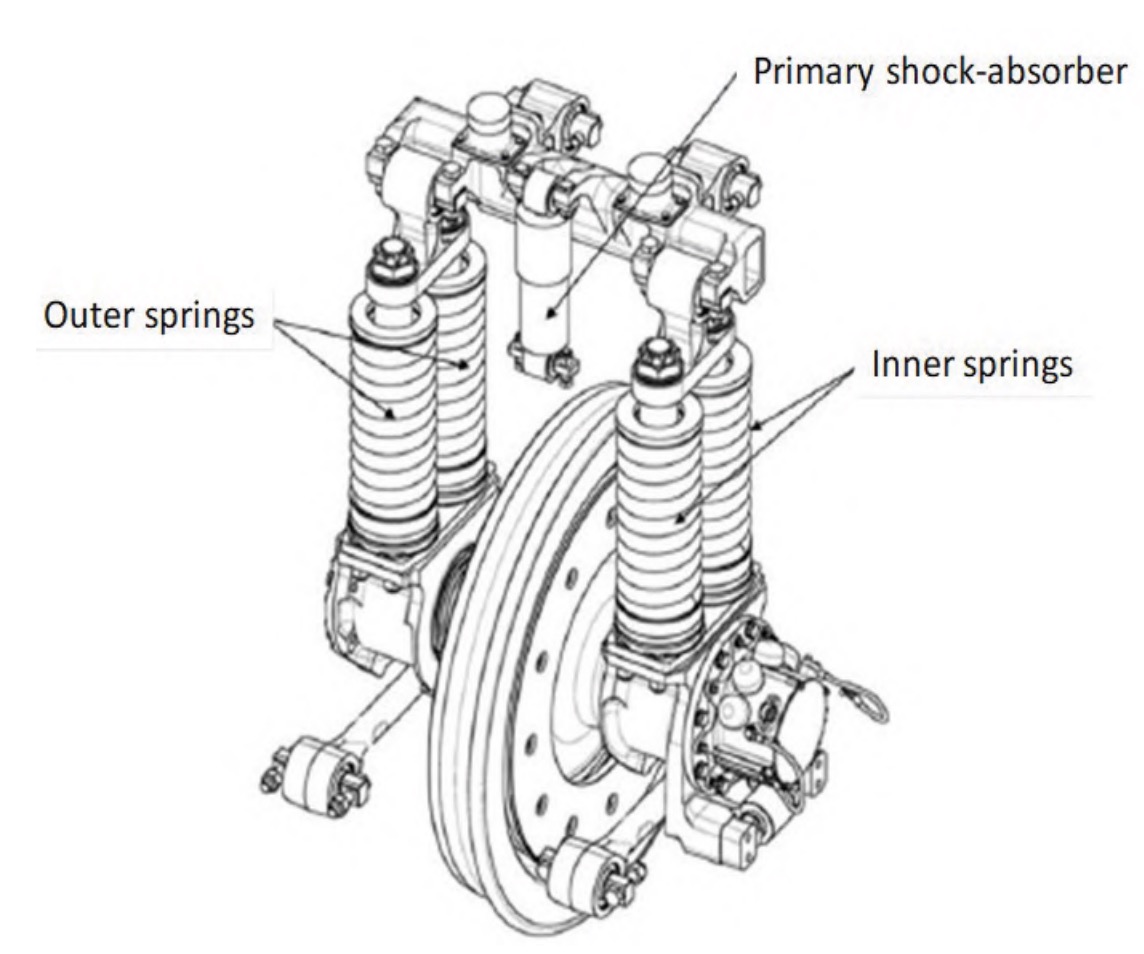
También se mantiene en esencia el sistema de basculación natural incorporado desde finales de los años 70 en el Talgo pendular, aunque el plano de la suspensión secundaria se sitúa a un nivel inferior en los trenes de alta velocidad. Pero la principal diferencia con respecto a las generaciones anteriores de trenes Talgo es el uso de una suspensión primaria (figura 8). De hecho, la optimización del sistema de suspensión en el tren de alta velocidad comenzó con la incorporación de una suspensión primaria en los ejes de las ruedas, además de la suspensión neumática en la parte superior de las columnas. La posible incorporación de un sistema de suspensión activa, capaz de optimizar la seguridad dinámica y el confort de marcha a partir de la información proporcionada por sensores situados a lo largo de todo el tren, se dejó para una fase posterior.
Por último, la figura 9 muestra una vista lateral del tren rodante del nuevo AVRIL, en la que se aprecian las suspensiones primaria y secundaria, así como el mecanismo de guiado.
ES163239A1).
3. Posibilidades de optimización del contacto rueda-carril
La incorporación del mecanismo de suspensión primaria permite variar la inclinación y el ángulo de ataque de cada rueda de forma independiente:
- El ángulo de caída puede variarse modificando la altura y la rigidez de los apoyos de cada uno de los cuatro muelles. De este modo, se puede diseñar el ángulo de caída más adecuado, basándose en un estudio detallado de la distribución de fuerzas y deslizamientos en la superficie de contacto. Esta modificación no es factible en la rodadura tradicional, en la que, obviamente, las ruedas deben montarse perpendiculares al eje común al que están rígidamente unidas.
Una evolución del sistema podría incorporar suspensiones con rigidez y posición ajustables en función, por ejemplo, de las condiciones de carga o de las características del trazado y la vía. Pero también podría plantearse el diseño de un sistema pasivo, donde la estructura sobre la que descansan los muelles de la suspensión primaria ofreciera una rigidez variable y no lineal, y permitiera obtener ángulos de caída óptimos en función de las fuerzas transmitidas a la rueda en cada condición de conducción. - Del mismo modo, el ángulo de ataque de cada rueda sobre el carril también puede variarse de forma independiente, modificando la posición de los apoyos de los dos tirantes longitudinales situados a ambos lados de la rueda. De este modo, se puede conseguir un pequeño ángulo de convergencia o divergencia entre las ruedas, lo que sería impensable en el caso de los ejes tradicionales.
De nuevo, este ángulo de ataque podría ajustarse en función de las condiciones. Esta posición podría controlarse activamente mediante un sistema de control adecuado. Pero, también en este caso, podría diseñarse un sistema pasivo de geometría variable, basado, como antes, en el diseño detallado de la estructura sobre la que descansan los tirantes, su rigidez y su modo de deformación bajo carga. Se trataría en este caso de utilizar las fuerzas transmitidas en el contacto para variar ligeramente el ángulo de ataque de la rueda en tiempo real en función de las condiciones de trabajo.
Teniendo en cuenta estas posibilidades de variación angular que se abren con la rodadura de ruedas libres guiadas, se ha abierto una línea de investigación para estudiar la influencia de estos parámetros en la distribución de fuerzas y deslizamientos en el contacto. El estudio también debe tener en cuenta la variación debida a las características del trazado (rectas, curvas, transiciones), condiciones de carga y geometrías de rueda y carril, en sus estados progresivos de desgaste y deformación.
Por un lado, se está trabajando en la aplicación de las teorías clásicas de contacto rueda-carril y su particularización para el caso descrito. Por otro lado, se aborda la modelización detallada del contacto introduciendo otras técnicas numéricas, como el método de elementos finitos, para complementar, comparar y validar resultados.
Los resultados obtenidos se combinarán con modelos de desgaste presentes en la literatura, para finalmente obtener algoritmos que permitan abordar la optimización del desgaste mediante la variación de los parámetros considerados. Y por supuesto, también habrá que analizar las posibles implicaciones de los cambios propuestos sobre el comportamiento dinámico del tren.
El trabajo es objeto de una tesis doctoral, gracias a la colaboración de Patentes Talgo y a la Universidad Miguel Hernández de Elche. Los primeros resultados publicables se esperan para los próximos meses.

4. Conclusiones
Gracias a la incorporación de las tecnologías aquí descritas, y en particular, gracias a su sistema de guiado, los trenes Talgo han demostrado a lo largo de décadas de funcionamiento ser capaces de ofrecer excelentes resultados en términos de desgaste. Pero hay margen de mejora. Y la vía de rueda libre guiada ofrece una libertad de diseño y unas posibilidades de optimización que no serían posibles con los trenes de rodadura convencional.
Como resultado de los trabajos de investigación que se han iniciado, se espera estar en condiciones de abordar una optimización del contacto rueda-carril en estos trenes, que redunde en una mejora aún mayor del desgaste. Y las mejoras que puedan proponerse, basadas en la optimización de la distribución de la presión y la minimización del deslizamiento de los contactos, deberían, a priori, tener también un efecto beneficioso en la reducción del ruido de rodadura, lo que podrá ser también objeto de un análisis detallado en futuros trabajos.

Bibliografía
Rovira, A. Roda, M.B. Marshall, H. Brunskill, R. Lewis. Experimental and numerical modelling of wheel-rail contact and wear. Wear 271 (2011) 911-924
Goicoechea Omar, A.: Sistema de articulación ligera combinada para organización de trenes en rutas guiadas. Patente nº ES151396A1. Oficina Española de Patentes y Marcas. (1941).
Goicoechea Omar, A.: Mejoras en los sistemas ferroviarios de articulación ligera combinada. Patente nº ES159301A1. Oficina Española de Patentes y Marcas. (1942).
Investigación y Aseguramiento Técnica S.A., Nardiz Landa, J.I. et al.: Suspensión de tipo primario para vehículos ferroviarios. Patente nº ES2061354A2. Oficina Española de Patentes y Marcas. (1994).
Carballeira, L. Baeza, A. Rovira, E. García. Technical characteristics and dynamic modelling of Talgo trains. Vehicle System Dynamics 46-Supplement (2008) 301-316
J.J. Kalker. Wheel-rail rollling contact theory. Wear, 144 (1991), 243-261
Patentes Talgo S.A.: Sistema guiado de pares de ruedas. Patente nº ES200131A1. Oficina Española de Patentes y Marcas. (1951).
Patentes Talgo S.A.: Rodadura guiada para vehículos ferroviarios. Patente nº ES206t362A1. Oficina Española de Patentes y Marcas. (1952).
Patentes Talgo S.A., López Gómez, J.L. et al.: Sistema para optimizar el guiado de ejes ferroviarios. Patente nº ES2195756A1. Oficina Española de Patentes y Marcas. (2001).
Patentes Talgo S.A., López Gómez, J.L.: Método para optimizar el guiado de vehículos ferroviarios. Patente nº ES2316220A1. Oficina Española de Patentes y Marcas. (2006).
Talgo S.A.: Vehículos ferroviarios articulados formados de elementos ligeros, cortos, bajos, sobre ruedas independientes, con rodadura guiada por tracción triangular. Patente nº ES163239A1. Oficina Española de Patentes y Marcas. (1943).
Miguel Sánchez Lozano. Universidad Miguel Hernández de Elche.
David Abellán López. Universidad Miguel Hernández de Elche.
Manuel García Troya. Universidad Miguel Hernández de Elche.
José Carlos Miguel de Priego. Patentes Talgo SLU.
José Luis López Gómez. Patentes Talgo SLU.