Análisis dinámico de los momentos articulares en la marcha humana en adultos y adultos mayores usando el análisis de componentes principales (PCA)
Dynamic analysis of joint moments in human gait in adults and the elderly using principal component analysis (PCA)
Javier Bermejo García (1), Daniel Rodríguez Jorge (1), Ashwin Jayakumar (1), Francisco Romero Sánchez (1), Francisco Javier Alonso Sánchez (1)
Resumen
Ciertos estudios analizan las variaciones en el patrón de la marcha entre adultos y adultos mayores. Entre las variaciones más significativas destaca el deterioro del sistema musculoesquelético, lo que provoca cambios en dicho patrón que dan lugar a un aumento del riesgo en caídas y un deterioro en la capacidad de realizar actividades de la vida diaria (AVD). El análisis dinámico de la marcha humana permite recoger y calcular diferentes tipos de datos cinemáticos, cinéticos y electromiográficos. Debido a este gran volumen de datos, es necesario aplicar un método para reducir las dimensiones de estos y, así, simplificar las del sistema. De esta forma, se llega a un conjunto de soluciones que permiten dar una interpretación de los datos más sencilla. Entre los diferentes métodos de reducción de dimensiones, en este artículo se propone aplicar el método de componentes principales (PCA) en los momentos articulares para realizar un análisis comparativo de la marcha entre adultos y adultos mayores. El PCA es una técnica de descomposición de datos que reduce la dimensionalidad de estos de tal manera que se pierda la menor cantidad de información posible. Por tanto, al aplicar el PCA a la descomposición del par articular en los 3 ejes coordenados en las distintas articulaciones del tren inferior, se puede estudiar la influencia de cada componente sobre la marcha para cada grupo poblacional. En consecuencia, se puede estudiar la viabilidad de diseño de terapias comunes a estos grupos o bien el diseño de ayudas técnicas y dispositivos de asistencia a la marcha de propósito general.
Palabras clave: Análisis de componentes principales, control motor, sinergias dinámicas, marcha, envejecimiento
Abstract
Certain studies analyze the variations in the gait pattern between adults and the elderly. Among the most significant variations, the deterioration of the musculoskeletal system stands out. And it causes changes in that pattern that cause an increased risk of falls and a deterioration in the ability to perform activities of daily living (ADL). The dynamic analysis of human gait allows the collection and calculation of different types of kinematic, kinetic and electromyographic data. Due to this large volume of data, it is necessary to apply a method to reduce their dimensions and, thus, simplify those of the system. Therefore, a set of solutions that allow a simpler interpretation of the data is reached. Among the different methods of dimension reduction, in this article it is proposed to apply the method of principal components (PCA) in the joint moments to carry out a comparative analysis of the gait between adults and the elderly. PCA is a data decomposition technique that reduces the dimensionality of data in such a way that as little information as possible is lost. Therefore, by applying the PCA to the decomposition of the joint pair in the three coordinate axes in the different joints of the lower body, the influence of each component on gait can be studied for each population group. Consequently, the feasibility of designing therapies common to these groups or the design of technical aids and general purpose gait assist devices can be studied.
Keywords: Principal component analysis, motor control, dynamic synergy, gait, ageing
Recibido / received: 03/06/2021. Aceptado / accepted: 20/10/2021.
1 Departamento de Ingeniería Mecánica, Energética y de los Materiales, Universidad de Extremadura
Autor para correspondencia: Javier Bermejo García. E-mail: ja******@**ex.es
Introducción
A medida que aumenta la edad de las personas adultas, la capacidad de estos sujetos para desarrollar diferentes acciones entre ellas disminuye, por ejemplo caminar, subir escaleras y realizar las actividades de la vida diaria (AVD) [1]. Para solventarlo, se han desarrollado diferentes tipos de dispositivos de asistencia a la marcha o exoesqueletos, como ReWalk [2] y REX [3]. Su objetivo es proporcionar una asistencia para restaurar la movilidad en diferentes tareas o actividades. Sin embargo, la principal desventaja de estos dispositivos para su uso es que son muy voluminosos, pesados y tienen un elevado precio [4]. Además, los elementos rígidos por los que están compuestos restringen los movimientos naturales del sujeto o no aplican los momentos adecuadamente debido a la desalineación de los actuadores con la articulación del sujeto [5].
Con el fin de solventar los problemas del exceso de peso y gran volumen de los exoesqueletos y, así, mejorar en el confort del usuario, recientemente, ha ido surgiendo el concepto de exoesqueleto vestible o exosuit. Consiste en un dispositivo robótico que realiza la transmisión de fuerzas a través de cables o elementos textiles que pueden ponerse como si fuera una prenda de vestir sin necesidad de estructuras rígidas que limiten el movimiento o que genere malestar al usuario [6]. Así pues, a la hora de realizar el diseño del exosuit, uno de los objetivos es el de utilizar el mínimo número de actuadores, a la vez que se incide en varias articulaciones al mismo tiempo para que, de esa forma, se disminuya el peso del dispositivo y se mejore la comodidad y la portabilidad del usuario [6], en lugar de contar con un actuador por articulación. Sin embargo, a la hora de diseñar un exosuit para la asistencia de la marcha para personas mayores, se deben tener en cuenta las alteraciones cinemáticas y cinéticas que presenta esta población como la reducción del momento articular de flexión de cadera y un aumento en el de momento de extensión de la misma articulación [7], que puede originar que la actuación del motor no se realizase de manera que asista correctamente al movimiento.
Con el fin de establecer una estrategia de actuación reducida que permita reducir el número de actuadores, se propone una estrategia basada en las sinergias dinámicas. Estas sinergias se identifican como patrones invariantes en los momentos articulares comunes en todos los humanos [8]. Para el cálculo de las sinergias dinámicas, se ha utilizado el análisis de componentes principales (PCA). El PCA es una técnica de análisis estadístico multidimensional que reduce las dimensiones (variables) para obtener un menor número de variables. Es decir, el objetivo del PCA es identificar un número reducido de variables que representen los datos originales perdiendo la mínima información posible [9-12]. La razón por la que se ha decidido estudiar las sinergias en función de los momentos articulares es que los parámetros cinéticos tienen una mayor previsibilidad a través de las velocidades de la marcha en comparación con los parámetros cinemáticos [13-15].
Por tanto, el objetivo de este trabajo es reducir el número de variables dinámicas en los momentos articulares e identificar aquellas más importantes (sinergias dinámicas) y, además, comprobar si existe alguna diferencia entre los componentes principales (PC) de adultos y adultos mayores a distintas velocidades de la marcha y, una vez identificadas las PC, poder estudiar la influencia de cada componente sobre la marcha tanto en adultos como en adultos mayores para analizar el diseño de ayudas técnicas y dispositivos de asistencia de la marcha de propósito general.
Material y método
Participantes
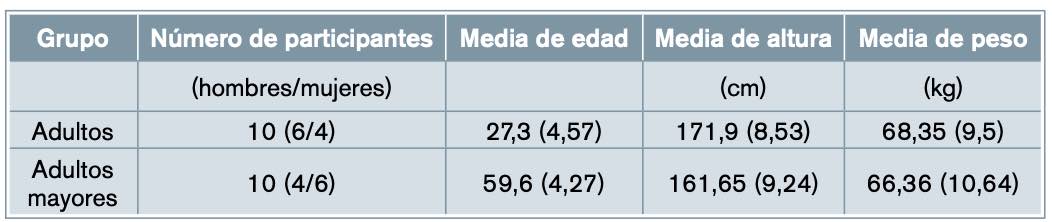
Los datos usados para este estudio proceden de una base de datos pública [16]. En este artículo, los autores declaran que los participantes del estudio han leído y firmado un consentimiento informado aprobado por el comité de ética de la Universidad Federal de ABC antes del experimento y que carecen de problemas físicos que les impidan caminar con normalidad (más información en Fukuchi et al, 2017 y Fukuchi et al, 2018 [16, 17]). De esta base de datos, se han elegido 10 adultos y 10 adultos mayores (Tabla 1).
Los datos obtenidos de esta base de datos fueron adquiridos mediante un sistema de captura de movimiento provisto de 12 cámaras (Raptor-4; Motion Analysis Corporation, Santa Rosa, CA, EE UU) con una frecuencia de muestreo de 150 Hz, y un tapiz rodante instrumentado (FIT; Bertec, Columbus, OH, EE UU) con una frecuencia de muestreo de los datos cinéticos de 300 Hz. Para más detalle consultar Fukuchi et al, 2018 [16].
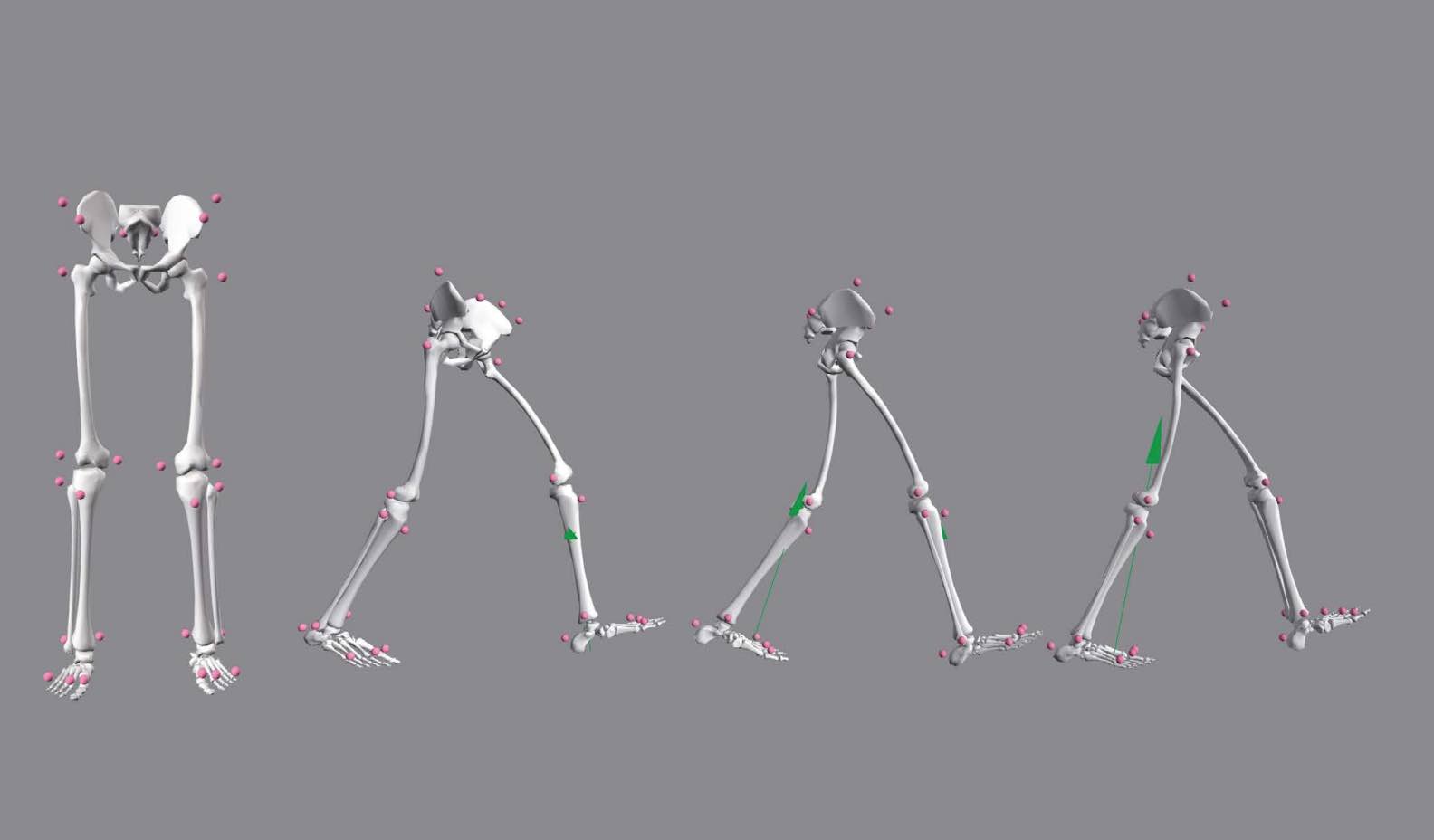
El protocolo de colocación de marcadores se realizó siguiendo un modelo de 26 marcadores anatómicos del tren inferior [18]. Para el análisis de la marcha, los sujetos hicieron una sesión de calentamiento caminando durante 5 minutos en el tapiz rodante para determinar la velocidad de la marcha confortable. Después de ello, se determinaron las diferentes condiciones de velocidad de la marcha, que fueron del 55%, el 100% y el 130% de la velocidad de marcha confortable determinada. Así, se han obtenido tres velocidades de marcha: lenta (L), confortable (C) y rápida (R). Los resultados obtenidos de los momentos articulares, y después de ser procesados [17], fueron normalizados al ciclo de la marcha en 101 datos.
Análisis de componentes principales
Para realizar el PCA se ha utilizado el algoritmo de descomposición en valores singulares (SVD). El SVD es un método para transformar variables correlacionadas en un conjunto de variables no correlacionadas que exponen mejor las diversas relaciones entre los elementos de datos originales y, al mismo tiempo, permite identificar y ordenar las dimensiones a lo largo de los cuales los puntos de los datos exhiben la mayor variación [19].


Para obtener una matriz de datos dinámicos reducida, se han utilizado los datos de los momentos de cada una de las articulaciones del miembro inferior. Dichos datos proceden de la base de datos pública anteriormente descrita. Para realizar la reducción de dimensiones, se ha creado una matriz M101x18. Contiene 18 columnas, cada una perteneciente a los componentes de los momentos articulares de articulación de la cadera, rodilla y tobillo, de los miembros inferior derecho e izquierdo. A continuación, se realizó el análisis de descomposición en valores singulares (SVD). Se aplica el SVD de momentos articulares:
 Donde U es una matriz de columnas ortonormales en la que UtU=I, S es una matriz de filas ortonormales en la que SSt , ? es una matriz diagonal que contiene los valores singulares ordenados de mayor a menor (?1 ? ?2 ? … ?18?0). Por tanto, la matriz M puede ser aproximada a otra matriz ?? reducida en dimensiones, reemplazando la matriz ? por ?m que contiene los mayores m valores singulares ?1 … ?m. En consecuencia, la aproximación quedará:
Donde U es una matriz de columnas ortonormales en la que UtU=I, S es una matriz de filas ortonormales en la que SSt , ? es una matriz diagonal que contiene los valores singulares ordenados de mayor a menor (?1 ? ?2 ? … ?18?0). Por tanto, la matriz M puede ser aproximada a otra matriz ?? reducida en dimensiones, reemplazando la matriz ? por ?m que contiene los mayores m valores singulares ?1 … ?m. En consecuencia, la aproximación quedará:
 Donde Um contiene las m primeras columnas de la matriz U y Sm contiene las m primeras filas de la matriz S. En esta reducción, Sm se conoce como las PC y el producto de Umdiag{?1 … ?m} es la matriz de pesos (Z).
Donde Um contiene las m primeras columnas de la matriz U y Sm contiene las m primeras filas de la matriz S. En esta reducción, Sm se conoce como las PC y el producto de Umdiag{?1 … ?m} es la matriz de pesos (Z).
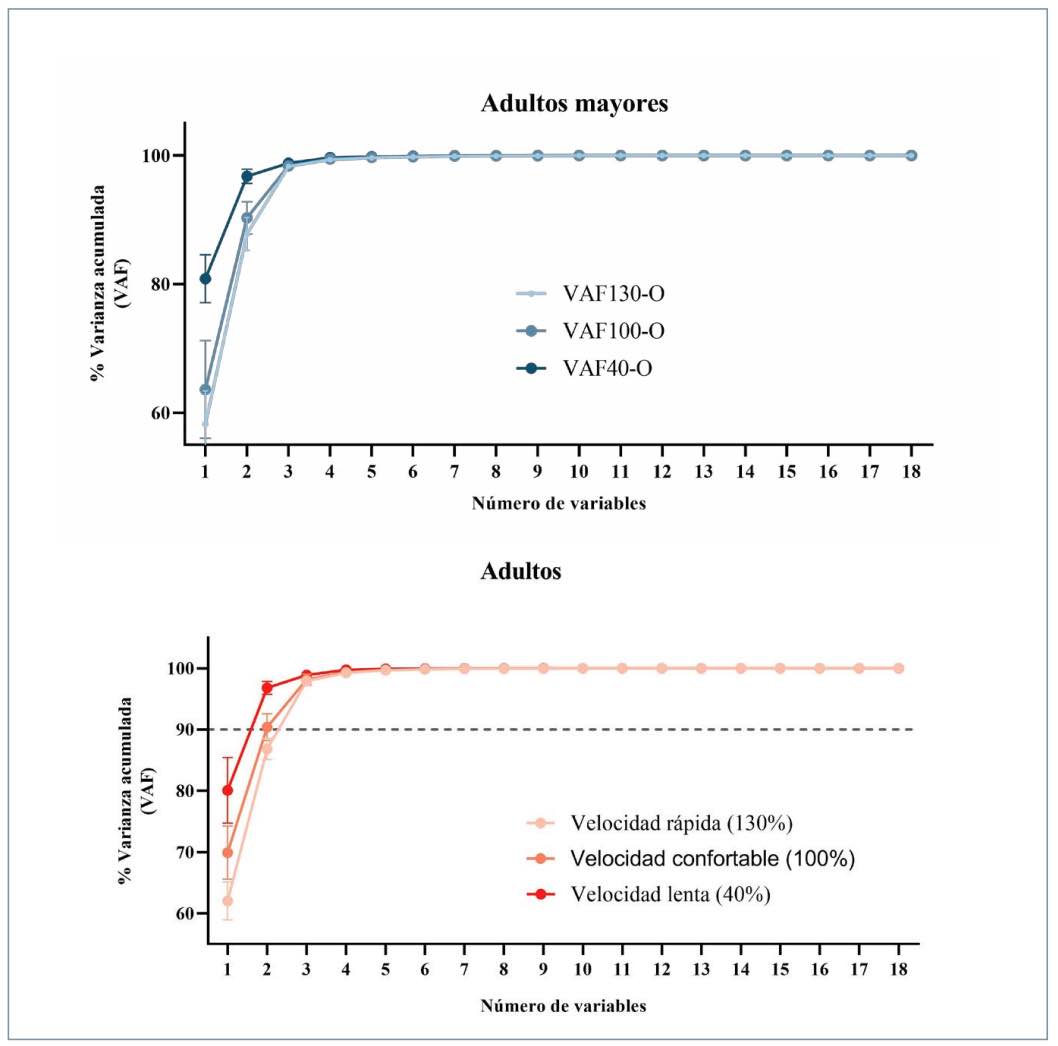
 Elección del número de dimensiones Para calcular el número de PC (m) se ha tenido en cuenta la varianza acumulada (VAF). Este índice indica la fracción del total de la varianza de las PC acumulada. En este trabajo, se ha tenido en cuenta que el número de variables elegido será cuando la varianza acumulada supere el 90%. Este valor ha sido determinado en trabajos anteriores [20]. Para el cálculo del VAF se usado la siguiente expresión:
Elección del número de dimensiones Para calcular el número de PC (m) se ha tenido en cuenta la varianza acumulada (VAF). Este índice indica la fracción del total de la varianza de las PC acumulada. En este trabajo, se ha tenido en cuenta que el número de variables elegido será cuando la varianza acumulada supere el 90%. Este valor ha sido determinado en trabajos anteriores [20]. Para el cálculo del VAF se usado la siguiente expresión:
A partir de la aplicación del SVD en el criterio del VAF, se ha obtenido una reducción en el número de variables que permitirán hacer una reconstrucción del movimiento de manera que se pierda la menor cantidad de información posible. Estas PC que explican un mayor porcentaje del VAF (%VAF) representan los datos con mayor variación, mientras que las PC con menor VAF son consideradas ruidos del sistema [20].
En la figura 1, se muestran los valores de VAF calculados tanto para los datos de los sujetos adultos como el de los adultos mayores. Como se puede comprobar, las dos primeras PC explican más del 90% de la varianza tanto a velocidad de la marcha lenta como a velocidad confortable, mientras que, para velocidades de marchas rápidas son necesarias tres PC para poder sobrepasar el criterio establecido.
Resultados
Para estudiar las diferencias entre los sujetos adultos con los sujetos adultos mayores a diferentes velocidades de marcha, se ha realizado un estudio estadístico en el que se comparan los dos grupos. Para ello, se han promediado los valores tanto de los pesos de cada grupo, como de cada una de las PC elegidas. Para comparar los pesos de cada grupo se ha realizado la prueba t no emparejada (_ = 0,05). Para comparar las PC de cada grupo de sujetos, primero se ha realizado un test de normalidad (test de Shapiro-Wilk) para comprobar si los datos se ajustan a la curva de normalidad y elegir el test estadístico correcto. Para comprar las PC entre el grupo de adultos y el de adultos mayores, se ha realizado la prueba de Mann-Whitney, ya que los datos de las PC no siguen una distribución normal en función de los resultados obtenidos en el test de normalidad.
Análisis de matriz de pesos (Sm)
Para hacer la comparación entre los pesos de las distintas velocidades de marcha se han promediado los valores de los 10 sujetos de cada grupo. En la figura 2, se muestran los resultados de los mismos. Como se muestra en el gráfico, las variables que tienen mayor peso son los momentos en el tobillo y en la cadera para adultos mayores, al igual que para los adultos, tanto a velocidad lenta como a velocidad confortable en ambos grupos. Se puede apreciar que, a medida que se aumenta la velocidad de la marcha, los valores de peso del tobillo pierden importancia y se hacen mayores los pesos en la variable de los momentos en las rodillas, y estos son necesarios para poder aceptar el criterio del 90% VAF. Esto puede deberse a que aumenta la velocidad de marcha.
Otra diferencia destacable que se puede apreciar en los gráficos es con respecto a los pesos en las variables de los momentos en la cadera entre ambos grupos. Como se puede apreciar (Fig. 2), los valores de estos son mayores en adultos mayores que en adultos en la segunda PC. Se debe a que el rango de movimiento es menor en adultos mayores con respecto a los rangos de movimiento de adultos [21]. Por tanto, a medida que aumenta la velocidad de marcha, los valores de los pesos dejan de ser tan importantes en adultos y se acumula la mayor importancia en los pesos de la primera PC.
Para comprobar si estas diferencias son significativas se ha aplicado la prueba t no emparejada (_ = 0,05). En la tabla 2, se muestran los valores p de cada una de las pruebas.
Análisis de las componentes principales (Sm)
Para hacer la comparación de las diferentes PC se han promediado los valores de todos los ancianos y adultos. Sobre estos valores se ha aplicado el test de normalidad de Shapiro-Wilk, cuyos resultados se pueden ver en las tablas 3 y 4.
En función de los resultados anteriores, se ha aplicado la prueba de Mann-Whitney para comparar las curvas de las PC entre los adultos y los adultos mayores (tabla 5). Al hacer la comparación entre ambos grupos, se ha demostrado que no hay diferencias significativas entre ambos grupos, lo que indica que cada una de las PC se mantiene robusta a los cambios de la velocidad.


Discusión
En esta investigación se han analizado los momentos de las articulaciones de cadera, rodilla y tobillo, teniendo en total 18 variables. Mediante el SVD se ha reducido el número de dimensiones para simplificar el problema y analizar las componentes principales que expliquen, como mínimo, el 90% del VAF. Bajo este criterio, solamente dos PC son necesarias para explicar el movimiento completo de la marcha.
Por tanto, se ha podido reducir notablemente el número de variables a tener en cuenta, lo que permitirá actuar de manera menos subjetiva a la hora de elegir la forma de actuación en el diseño un exosuit que permita la asistencia de la marcha para adultos mayores que sean incapaces de alcanzar los niveles de momento necesarios para realizar una marcha normal.
Shemmell et al. [13] concluyen que no hay ningún efecto de la velocidad de marcha en la forma de las PC durante la fase del swing de la marcha, lo que supone que las magnitudes de los momentos en las articulaciones de la cadera, la rodilla y el tobillo durante esta fase se escalan linealmente a medida que aumenta la velocidad de la marcha. En consecuencia, es importante tener en cuenta las fases previas al swing. Nuestros resultados sugieren que los momentos articulares en el tobillo (Z1) y en la cadera (Z2) son aquellos que acumulan mayor importancia, por lo que una asistencia en las fases previas a la marcha, por ejemplo, durante la flexión plantar, podría asistir el movimiento para que se realice de manera cómoda y eficiente.
Estos resultados obtenidos se pueden relacionar con otros estudios que obtuvieron resultados similares como es el caso del estudio realizado por Chen et al. [22]. Demostraron que cualquier alteración en la estrategia de actuación de la cadera o el tobillo puede modificar la iniciación de la fase del swing debido, sobre todo, a una inadecuada propulsión del miembro inferior, por lo que es un criterio fundamental para tener en cuenta en el diseño. En relación con otros trabajos, se ha demostrado que la aplicación de fuerza asistida en las articulaciones de la cadera [23, 24] o del tobillo [25, 26] mejoran el rendimiento de los individuos con alguna alteración en la marcha.
En un estudio más reciente realizado por Iyer et al. [27] remarcan que la actuación en una sola articulación puede dar lugar a asimetrías o alteraciones de la marcha, por lo que actuar sobre una sola articulación podría ser contraproducente a la hora de asistir la marcha. En este mismo artículo, la actuación sobre alguna de las articulaciones de cadera y tobillo redujo el ángulo de la rodilla durante la fase de swing, lo que concuerda con nuestros resultados de solamente mediante la actuación conjunta de cadera y tobillo. Resultados similares a los presentados obtuvieron Quinlivan et al. [28], quienes midieron el coste
metabólico a través de la actuación conjunta de la flexión plantar del tobillo y la flexión de cadera.
Por tanto, el PCA es una técnica sencilla y fácil de implementar que permite identificar aquellas variables que acumulan mayor importancia. Es un buen método para determinar las variables sobre las que actuar a la hora de hacer el diseño de un exosuit.
Conclusión
En este trabajo se ha investigado si existe alguna diferencia entre las diferentes PC de los datos de momentos de cada una de las articulaciones entre adultos mayores y adultos a distintas velocidades de marcha. A partir de los resultados, se concluye que la marcha humana puede definirse con dos PC, para velocidades de marcha lenta y confortable, pero, para explicar al menos el 90% de la varianza, son necesarias tres PC en velocidades de marcha más rápidas. Estos datos coinciden con los resultados obtenidos en otros estudios anteriores [27, 29]. Cabe destacar que, a pesar de necesitar más PC para explicar la varianza, no hay diferencias estadísticas entre las de adultos mayores y adultos. Sin embargo, si hay diferencias entre los pesos (Zm), en los que la evidencia más importante ocurre en los pesos de la variable que corresponde con los momentos de la cadera. Por ello, a la hora de diseñar un exoesqueleto se debe tener en cuenta sobre qué articulaciones van a actuar. Mediante el estudio de las sinergias dinámicas se pueden establecer aquellas variables más relevantes y, así, poder elegir de manera más objetiva qué articulación o articulaciones actúan, así como establecer un diseño de los componentes que conforme dicho dispositivo.
Referencias
[1] Ko, S., Stenholm, S., Ferrucci, L. “Characteristic gait patterns in older adults with obesity—Results from the Baltimore Longitudinal Study of Aging”. Journal of Biomechanics, Elsevier BV 43, 1104-1110 (2010).
[2] Esquenazi, A., Talaty, M., Packel, A., Saulino, M. “The ReWalk Powered Exoskeleton to Restore Ambulatory Function to Individuals with ThoracicLevel Motor-Complete Spinal Cord Injury”. American Journal of Physical Medicine & Rehabilitation, Ovid Technologies (Wolters Kluwer Health) 91, 911-921 (2012).
[3] Bionics, Rex. “Rex bionics”. Página Web (www. rexbionics. com), Visitado: Mayo (2020).
[4] Mertz, L. “The Next Generation of Exoskeletons: Lighter, Cheaper Devices Are in the Works”. IEEE Pulse, Institute of Electrical and Electronics Engineers (IEEE) 3, 56-61 (2012).
[5] Schiele, A. “Ergonomics of exoskeletons: Objective performance metrics”. World Haptics 2009 – Third Joint EuroHaptics conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, IEEE, 103-108 (2009).
[6] Asbeck, A. T., Dyer, R. J., Larusson, A. F., Walsh, C. J. “Biologically-inspired soft exosuit”. 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), IEEE, 1-8 (2013).
[7] Silder, A., Heiderscheit, B., Thelen, D. G. “Active and passive contributions to joint kinetics during walking in older adults”. Journal of Biomechanics 41, 1520-1527 (2008).
[8] Profeta, V. L., Turvey, M. T. “Bernstein’s levels of movement construction: A contemporary perspective”. Human movement science, 57, 111-133, (2018).
[9] Jolliffe, I. T., Cadima, J. “Principal component analysis: a review and recent developments”. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 374, (2016).
[10] Wang, X. “The Dimensionality and Control of Human Walking”. Tesis doctoral, University of Sydney, Australia (2012).
[11] Boehmke, B., Greenwell. B. M. Hands-on machine learning with R. CRC Press, Taylor & Francis Group, 2019.
[12] Daffertshofer, A., Lamoth, C. J., Meijer, O. G., Beek, P. J. “PCA in studying coordination and variability: a tutorial”. Clinical Biomechanics. Elsevier BV 19, 415-428 (2004).
[13] Shemmell, J., Johansson, J., Portra, V., Gottlieb, G. L., Thomas, J. S., Corcos, D. M. “Control of interjoint coordination during the swing phase of normal gait at different speeds”. Journal of NeuroEngineering and Rehabilitation 4, (2007).
[14] Kao, P. C., Lewis, C. L., Ferris, D. P. “Invariant ankle moment patterns when walking with and without a robotic ankle exoskeleton”. Journal of Biomechanics 43, 203-209 (2010).
[15] Prilutsky, B. I., Sirota, M. G., Gregor, R. J., Beloozerova, N. “Quantification of Motor Cortex Activity and Full-Body Biomechanics During Unconstrained Locomotion”. Journal of Neurophysiology 94, 2959-2969 (2005).
[16] Fukuchi, C. A., Fukuchi, R. K., Duarte, M. “A public dataset of overground and treadmill walking kinematics and kinetics in healthy individuals”. PeerJ 6, (2018).
[17] Fukuchi, R. K., Fukuchi, C. A., Duarte, M. “A public dataset of running biomechanics and the effects of running speed on lower extremity kinematics and kinetics”. PeerJ 5, (2017).
[18] Leardini, A., Sawacha, Z., Paolini, G., Ingrosso, S., Nativo, R., Benedetti, M. G. “A new anatomically based protocol for gait analysis in children”. Gait & Posture 26, 560–571 (2007).
[19] Leskovec, J., Rajaraman, A., Ullman, J. D. Mining of massive data sets. Cambridge university press (2020).
[20] Deluzio, K. J., Astephen, J. L. “Biomechanical features of gait waveform data associated with knee osteoarthritis”. Gait & Posture 25, 86–93 (2007).
[21] McGibbon, C. A. “Toward a better understanding of gait changes with age and disablement: Neuromuscular adaptation”. Exercise and Sport Sciences Reviews 31, 102-108 (2003).
[22] Chen, G., Patten, C., Kothari, D. H., Zajac, F. E. “Gait differences between individuals with poststroke hemiparesis and non-disabled controls at matched speeds”. Gait & Posture 22, 51-56 (2005).
[23] Lewis C. L., Ferris, D. P. “Walking with increased ankle pushoff decreases hip muscle moments”. Journal of Biomechanics 41, 2082-2089 (2008).
[24] Zhang, J., Fiers, P., Witte, K. A., Jackson, R. W., Poggensee, K. L., Atkeson, C. G., Collins, S. H. “Human-in-the-loop optimization of exoskeleton assistance during walking”. Science 356, 1280- 1284 (2017).
[25] Bae et al. “A Lightweight and Efficient Portable Soft Exosuit for Paretic Ankle Assistance in Walking After Stroke”. 2018 IEEE International Conference on Robotics and Automation (ICRA), (2018).
[26] Ding, Y., Kim, M., Kuindersma, S., Walsh, C. J. “Human-in-the-loop optimization of hip assistance with a soft exosuit during walking”. Science Robotics 3, (2018).
[27] Iyer, S. S., Joseph, J. V. Vashista, V “Evolving Toward Subject-Specific Gait Rehabilitation Through Single-Joint Resistive Force Interventions”. Frontiers in Neurorobotics 14, (2020).
[28] Quinlivan, B. T., Sangjun, L., Malcolm, P., Rossi, D. M., Grimmer, M., Siviy, C., et al. “Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit”. Science Robotics 2, (2017).
[29] Funato, T., Aoi, S., Oshima, H., Tsuchiya, K. “Variant and invariant patterns embedded in human locomotion through whole body kinematic coordination”. Experimental Brain Research 205, 497-511 (2010).