
Mejora de las asignaturas relativas a prevención de riesgos laborales con la introducción de la robótica colaborativa
Improvement of subjects related to prevention of occupational risks with the introduction of collaborative robotics
Miguel Ángel Mariscal1, Clara López Santamaría2, Sergio Ortiz3 y Eva María López4
Abstract
It is necessary to introduce in occupational risk prevention subjects new knowledge about the new technologies available in industry. For this reason, with the appearance of collaborative robots (cobots) the student within the part of machine safety proposes a practice for its use and knowledge.
Keywords: Cobot, simulation, occupational risk prevention, machines.
Resumen
Es necesario introducir en asignaturas de prevención de riesgos laborales nuevos conocimientos sobre las novedosas tecnologías disponibles en industria. Por ello, con la aparición de los robots colaborativos (cobots) se plantea una práctica para su uso y conocimiento por parte del estudiante dentro de la parte de seguridad en máquinas.
Palabras clave: Cobot, simulación, PRL, máquinas.
Recibido / received: 08/06/2022. Aceptado / accepted: 11/10/2022.
1 Departamento de Ingeniería de Organización, Escuela Politécnica Superior, Universidad de Burgos.
2 Departamento de Filología Moderna, Facultad de Filosofía y Letras, Universidad de Alcalá de Henares.
3 Departamento de Ingeniería de Organización, Escuela Politécnica Superior, Universidad de Burgos.
4 Departamento Ciencias de la Educación, Facultad de Educación, Universidad de Burgos.
Autor para correspondencia: Miguel Ángel Mariscal; e-mail: ma******@*bu.es
Introducción y objetivos
Los robots colaborativos o cobots son aquellos que, por definición, pueden compartir el espacio de trabajo con los operarios, sin necesidad de vallados perimetrales de seguridad y solo con protecciones parciales (Mariscal, 2019).
Esta tecnología resulta muy importante, dado que España es uno de los países con mayor densidad de robots industriales de Europa (este término engloba tanto los robots tradicionales como los colaborativos), unos 170 robots por cada 10.000 empleados (Mariscal, 2020).
Por tanto, se juntan dos aspectos, primero que los cobots son de reciente implantación, pero con un crecimiento exponencial en la implementación dentro de las empresas y que, por su propia definición, no llevan vallados perimetrales, con lo cual los aspectos relativos a seguridad toman una especial importancia.
Es necesario introducir estos nuevos elementos en las asignaturas de prevención de riesgos laborales impartidas en la actualidad en la enseñanza universitaria.

El objetivo ha sido la introducción de una práctica con robótica colaborativa para introducir dicha tecnología en una asignatura de Prevención de Riesgos Laborales. Se buscan dos aspectos:
· Dar conocimientos de robótica colaborativa en la titulación.
· Complementar los conocimientos sobre seguridad en máquinas y evaluación de riesgos laborales.
A continuación, se muestra un ejemplo de cómo ver dentro de una asignatura de prevención de riesgos una práctica de seguridad en máquinas con especial enfoque en seguridad en cobots y riesgos psicosociales relativos al trabajo con dichos cobots.
Metodología
Ámbito de actuación
Se toma como ejemplo la asignatura de Prevención de Riesgos Laborales en el grado de Organización Industrial de la Universidad de Burgos. La asignatura optativa de 4º curso tiene en su guía los siguientes objetivos docentes (web ubu):
“Conocer los riesgos analizados en las especialidades de seguridad, higiene y ergonomía-psicosociología, así como las técnicas analíticas y operativas adecuadas a cada caso”.
Las unidades docentes afectadas serían las siguientes: Bloque 2. Seguridad en el trabajo
Tema 4. El accidente de trabajo.
Tema 6. Evaluacion de riesgos.
Bloque 3. Otras especialidades de PRL. Tema 9. Ergonomía y psicosociología.
Actividad propuesta
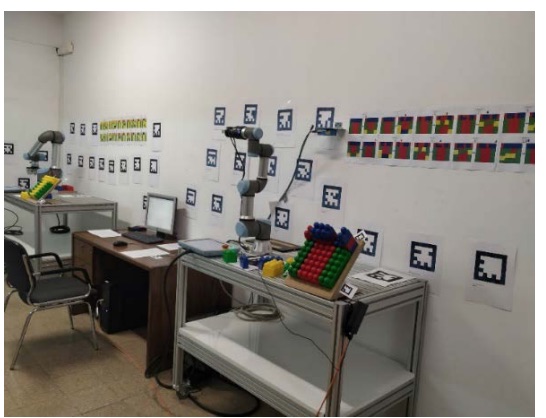
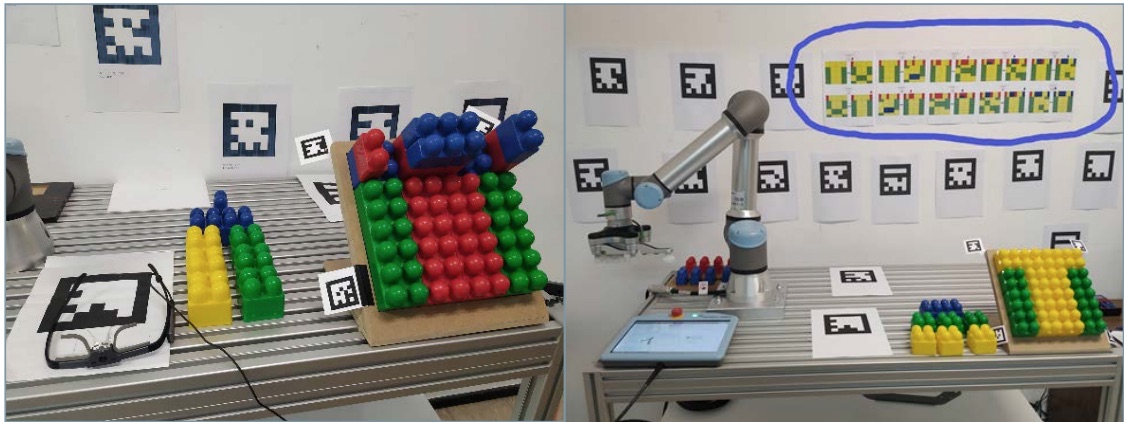
Para la impartición de la práctica de la asignatura anteriormente descrita (2 horas de teoría y 2 horas de práctica) y con el objetivo de alcanzar las competencias de la misma, se dispone de dos cobots, UR3 y UR5, en el laboratorio de simulación. También se dispone de un eye-tracker Tobi Pro II (véanse figuras 1 y 2).
La práctica que deben realizar los alumnos es:
• Explicación de lo que es un robot colaborativo. Funciones, capacidades y parámetros. Descripción de utillajes.
• Explicación de qué es un eye-tracker. Condiciones de uso, variables recogidas.
• Estudio de la normativa de PRL respecto a cobots. ISO-TS 15066. Además, se revisarán las siguientes normativas:
– ISO 10218-1: requisitos para robots industriales. Parte 1: robots.
– ISO 10218-2: requisitos para robots industriales. Parte 2: sistemas de robots e integración.
– ISO 11161: sistema de fabricación integrado: requisitos básicos.
– ISO 13849-1: partes relacionadas con la seguridad de los sistemas de control. Parte 1: principios generales para el diseño.
– ISO 13850: función de parada de emergencia: principios para el diseño.
– ISO 13851: dos dispositivos de control de mano: aspectos funcionales y principios de diseño.
– ISO 13855: posicionamiento de salvaguardias respecto a las velocidades de aproximación de las partes del cuerpo humano.
• Detalle del experimento a realizar. Para ello, se realizará por parte de un alumno una simulación de operaciones de trabajo, con el uso conjunto de cobot y eye-tracker.
• Visualización de los parámetros recogidos en cuanto a PRL y a estrés laboral.
• Análisis de los resultados y comparación respecto a la normativa vigente.
Hay multitud de utillaje disponible para robots colaborativos. Antes de especificar los distintos tipos que hay de pinzas para robot o manipulador, cabe aclarar la diferencia entre ambos conceptos. Un manipulador es, a grandes rasgos, un brazo compuesto por elementos mecánicos con articulaciones entre ellos. En la última unión se posiciona un dispositivo funcional, como una pinza o un gripper especial para llevar a cabo las distintas operaciones que se requieran.
• Pinzas y dedos: en el mercado hay muchos útiles y manos de robots estandarizados. Su uso es común en procesos industriales más simples de manipulación de distintas piezas:
– De cierre angular o paralelo.
– De vacío.
– Magnéticas.
• Herramientas: a la muñeca del robot industrial no solo se le puede acoplar un manipulador, sino también herramientas específicas, como atornilladores, soldadores, láser, dosificadores de adhesivo, dosificadores de pintura, pulidoras, etc.
• Grippers versátiles: finalmente, muchos procesos industriales son específicos y distintos para cada método de fabricación. Por ello, la solución final requiere del diseño específico y a medida de útiles, garras o manos especiales que no se encuentran en el mercado. Como ejemplos existen, telas de airbag, extracción de inyectoras, pinzas y corte, flameadores, aplicadores de adhesivo, atornillador, aplicadores de insertos, visión artificial, soldadura por ultrasonido, paletizado y manipulado y pinzas con agarre interior/exterior.
En la demostración se realizarán cuatro simulaciones. Se realiza la misma tarea con dos cobots de distintos tamaños, UR3 y UR5, en dos casos, usando el cobot como suministrador de piezas o que una persona sustituya al cobot para suministrar dichas piezas. En este caso, se utilizará una pinza de dos dedos, como se puede ver en la figura 2. Un ejemplo de las operaciones a realizar y del cuadro de trabajo se muestra en las figuras 3 y 4.
Resultados
Los resultados de la práctica ayudan a alcanzar la competencia marcada de compresión y dominio de la prevención de riesgos laborales al realizar una simulación con máquinas reales. Se consigue manejar robots colaborativos, evaluar sus riesgos mediante simulación y ver cómo influyen en el estrés del trabajador. Anteriormente, se realizaba la práctica mediante exposición de fotografías y vídeos, pero no con un manejo de una máquina real.
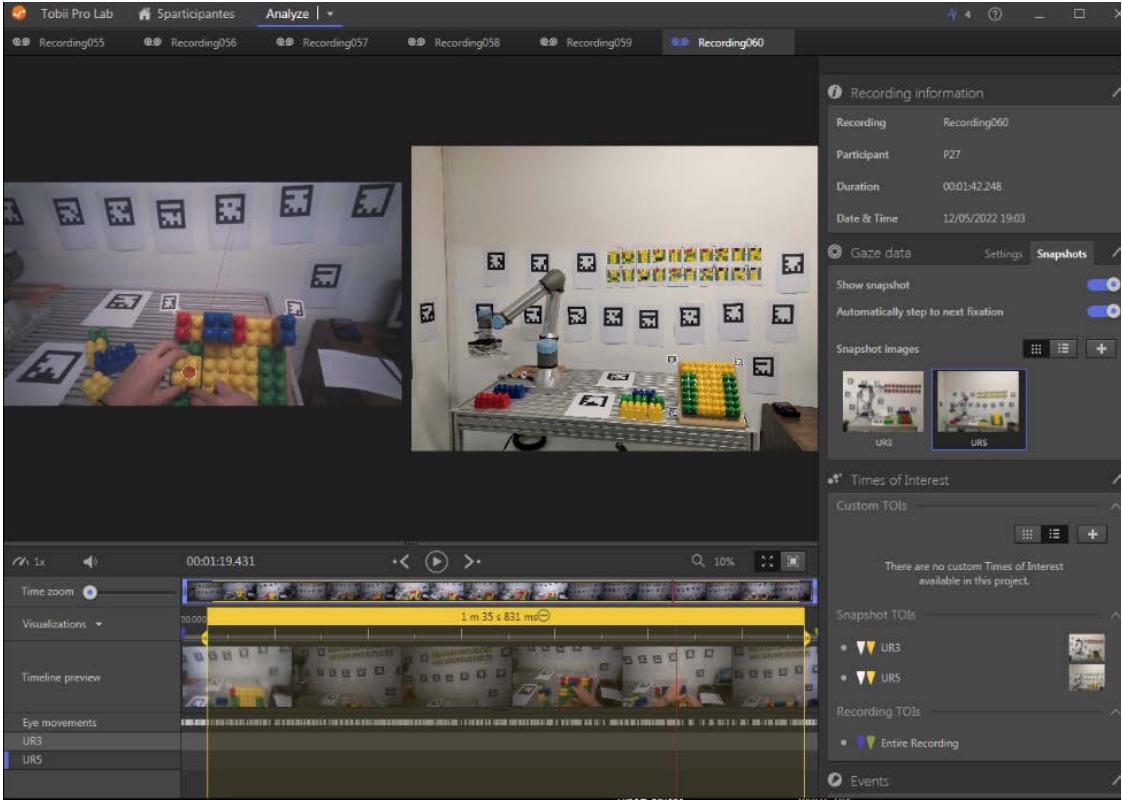
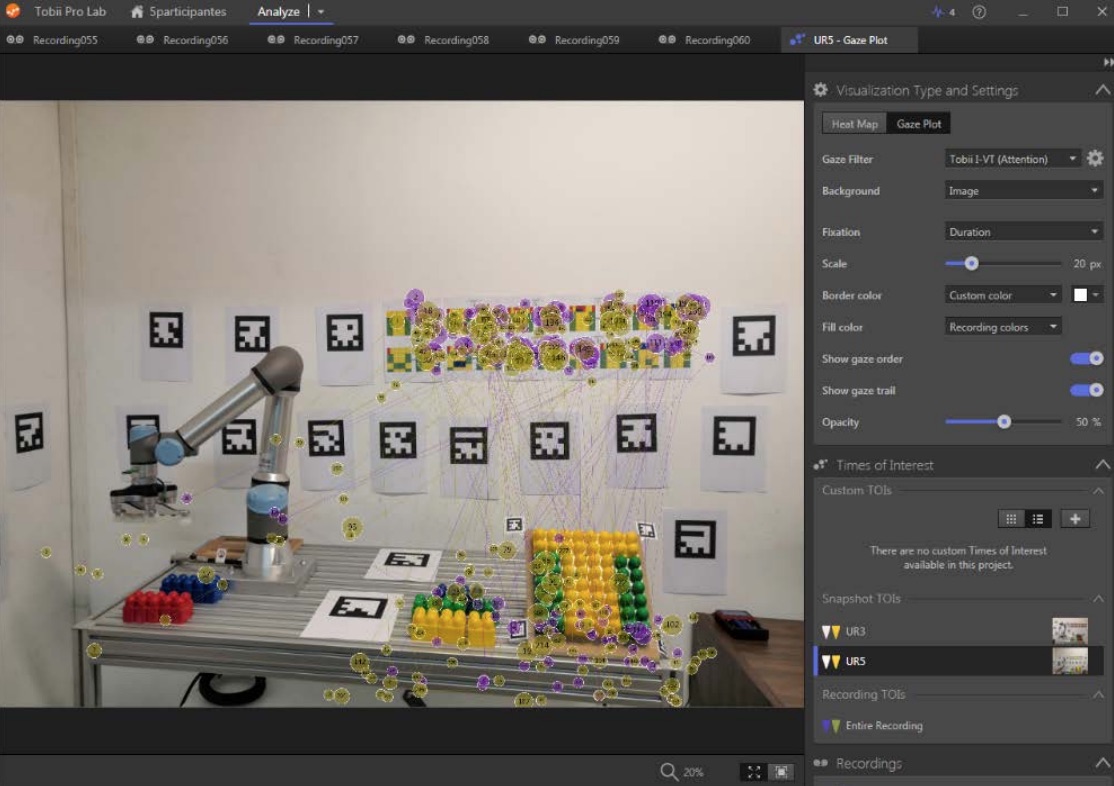
A continuación, se muestran en las figuras 5 y 6 dos ejemplos de parte de los resultados que los alumnos pueden visualizar.
En el primer caso de la figura 5 se muestra una pantalla del programa Tobi Pro II que recoge los datos del eye-tracker, la grabación visual y las posibilidades de tratamiento de los datos.
En la figura 6 se muestra un ejemplo de los datos ya tratados con el mismo software y, en concreto, la nube de puntos generada con el ejemplo ya tratado.
Conclusiones
Dada la evolución en la tecnología y la incorporación de nuevos elementos en las industrias, es necesario formar a los estudiantes en esos nuevos equipamientos y en las implicaciones que hay en la prevención de riesgos laborales.
En el ejemplo mostrado se detalla una nueva práctica a incorporar en cualquier asignatura genérica de prevención de riesgos laborales, en concreto para la parte de seguridad en máquinas, con la aplicación de los conocimientos teóricos explicados para su utilización en robots colaborativos.
Adicionalmente, se explica y se utiliza un eye-tracker para captar, tratar y visualizar los datos obtenidos a través de un ejercicio con cobot-eyetracker.
Esta práctica se realizó de forma experimental en el curso 2021-22 y está preparada ya para su implementación en cursos posteriores. Además, es posible su utilización en cualquier asignatura de prevención de riesgos laborales, para la parte de seguridad en máquinas. Es necesario revisar la práctica para añadir un ejemplo de evaluación de riesgos en máquinas y ampliar la parte de evaluación del riesgo de estrés del trabajador.
Es necesario ampliar este ejemplo a otras asignaturas de los grados en ingeniería industrial, con materias propias de prevención o aquellas del área de organización de empresas que tengan alguna parte relativa a prevención de riesgos laborales.
Finalmente, cabe señalar que se ha cumplido con uno de los objetivos del proyecto financiado por la Consejería de Industria de la Junta de Castilla y León referenciado al final, para difundir la prevención de riesgos laborales en especial, en la formación universitaria de ingeniería.
Agradecimientos
Esta inclusión en los contenidos de la asignatura ha sido posible gracias a la financiación de la Consejería de Industria de la Junta de Castilla y León a través de la financiación del proyecto: “La prevención de riesgos laborales en la industria 4.0. Estudio de condiciones de trabajo y simulación de riesgos con robótica colaborativa. Difusión de resultados para la sensibilización en Castilla y León.” De referencia INVESTUN/21/BU/0005.
Referencias
Mariscal M.A., et al. Risk management and cobots. Identifying critical variables, in Proceedings of the 29th EUROPEAN SAFETY AND RELIABILITY CONFERENCE (ESREL 2019). 2019. p. 1834-1841.
Mariscal, M. A., García S., Gonzalez, J. (2020). Estado de la implantación de la industria 4.0 en las empresas de Castilla y León. ISBN: 978-84- 95308-14-6. Consejo Económico y Social de Castilla y León.
Web ubu: https://www.ubu.es/grado-eningenieria-de-organizacion-industrial-espanoly-bilingue-en-ingles/informacion-basica/ guias-docentes
What is the main objective of introducing collaborative robotics (cobots) into Occupational Risk Prevention subjects, according to the article?