
‘Input Shaping’ para sistemas multicuerpo oscilatorios con dinámica descrita por DAE: Aplicación a sistemas mecánicos de transporte de piezas en cabeza
Resumen
Input Shaping es una tecnología de prealimentación cuya fiabilidad mejora la respuesta dinámica de los sistemas lineales descritos por ecuaciones diferenciales ordinarias (ODE) y modelos de partículas orientadas. Este trabajo se dedica a examinar el Input Shaping en sistemas oscilatorios multicuerpo con dinámica descrita por ecuaciones diferenciales algebraicas (DAE). Se ha elegido una grúa con carga en un péndulo doble, ya que presenta dinámica no lineal. Se han obtenido sus modos de vibración a partir de los autovalores de la matriz jacobiana del espacio de estados del sistema. Para verificar la fiabilidad de estos modos de vibración, se muestreó el tiempo de oscilación correspondiente a los ejes locales de cada link. Así, la transformada de Fourier (FFT) de ambas señales permite la estimación de las frecuencias naturales asociadas a ambos modos, que corresponden con la sintetizada analíticamente. Se calcularon input shapers para esos multimodos de vibración gracias a la convolución de los shapers SI específicos de cada modo. En todo caso, el filtrado funciona bien para este sistema.
Palabras clave
Grúas con carga en cabeza, DAE, método de proyección de la velocidad, matriz R, autovalores del sistema multicuerpo.
Abstract
Input Shaping is a feedforward technology whose reliability improves the dynamic response of linear systems described by Ordinary Differential Equations (ODEs). This work examines the issue of Input Shaping for multibody oscillatory systems whose dynamics is described by differential algebraic equations (DAEs). An overhead crane whose payload is a double link was chosen. This multimode system exhibits nonlinear dynamics and its modes of vibration have been obtained by carrying out the eigenvalues of the Jacobian matrix of the state-space equations system. Said modes of vibration were collected against each link’s orientation and the FFT of the time signals allowed for the estimation of the system natural frequencies. Also Input Shapers were calculated for those modes of vibration by convolving specified insensitive IS-shapers for each mode. Filtering performed well in the end.
Keywords
Overhead cranes, DAEs, velocity projection method, R-matrix, Multibody System Eigenvalues.
Recibido / received: 15.05.2018. Aceptado / accepted: 18.06.2018.
Introducción
El número de grúas en uso se ha convertido en un indicador fiable del grado de desarrollo y crecimiento económico de un país. El estudio de este conjunto de máquinas ha recibido una atención significativa con el objetivo de mejorar su respuesta dinámica. El grupo de grúas objeto de este trabajo es el de sistemas de transporte de piezas en cabeza, utilizados en fábricas para alimentar componentes como tipos de piezas
o cuerpos, en células de fabricación y almacenes intermedios. Las piezas se desplazan colgadas de ganchos a carritos que se trasladan en una guía. La oscilación respecto de la vertical que sufren las piezas en este tipo de sistemas de transporte representa una respuesta dinámica indeseada desde una perspectiva ingenieril.
El retorno de inversión económica en mejorar estos sistemas mecánicos es solo un argumento de los muchos que justifican por qué estudiar, analizar y tratar de mejorar la respuesta dinámica de estos sistemas.
Definición del problema
Las operaciones realizadas con grúas con carga en cabeza llevan asociadas cargas distribuidas multicuerpo en movimiento. Mitigando la influencia transitoria se evita la colisión entre tales cargas y sus alrededores. Si se cancela la vibración residual al final del movimiento, se facilitan las operaciones de carga y descarga; superar la flexibilidad beneficia la rapidez de ejecución y efectividad de las operaciones.
Se han encontrado trabajos, referenciados en la bibliografía, que han estudiado la forma de anticiparse a la respuesta dinámica de los sistemas subamortiguados denominada Posicast (Smith, 1957), que convierte un escalón de entrada en una escalera shapeada. Por desgracia, esta teoría era muy sensible a los errores en la identificación de las frecuencias naturales de vibración de los sistemas mecánicos.
Sin embargo, en 1989 dos ingenieros del Instituto Tecnológico de Massachusetts (MIT), Singer y Seering (Neil, Warren y Seering, 1990), consiguieron minimizar la vibración de forma anticipada a la respuesta, por medio de la resolución del cálculo de filtro de retardo temporal, robustos frente a errores de identificación. Esta teoría se denominó Input Shaping, y creció y se conocen hoy en día variaciones de la misma (Book, 1993; Junkins y Kim, 1993). Sin embargo, falta el trabajo relativo a la aplicación de los sistemas multicuerpo, cuya dinámica está descrita por ecuaciones diferenciales algebraicas (DAE), donde la identificación de las frecuencias naturales y las proporciones amortiguadas no son fáciles de obtener como en el caso de sistemas lineales descritos por Ordinary Differential Equations (ODE).
Para dar solución al problema de la mejora de la respuesta dinámica del sistema de transporte de piezas en cabeza mediante Input Shaping se ha limitado la vibración de la carga suspendida, dos piezas paralelepipédicas articuladas entre sí o links y la superior, a su vez, unida al carrito. Este sistema se modela mediante técnicas de sistemas multicuerpo.
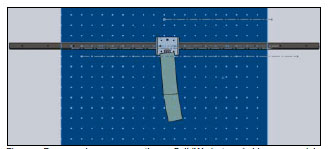
El sistema multicuerpo construido en laboratorio simula el comportamiento de una grúa pórtico.
Análisis cinemático del modelo multicuerpo de grúas pórtico
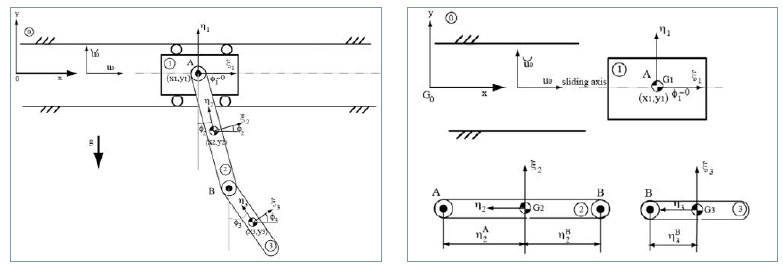
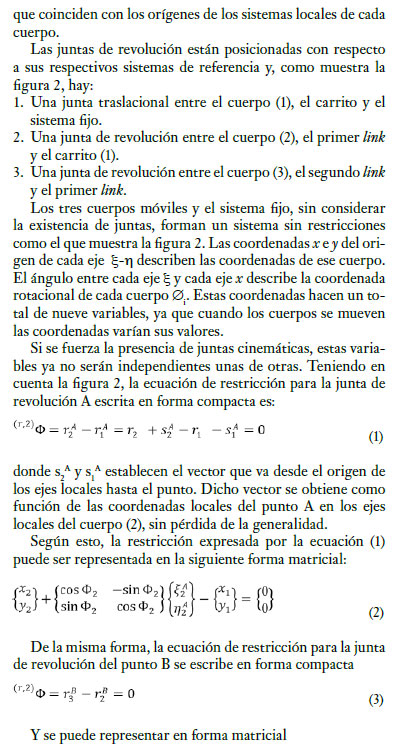
El sistema multicuerpo de la figura 1 contiene tres cuerpos móviles: el carrito (1), el primer link (2) y el segundo link (3) de la carga. También se tiene un sistema x-y (0). El sistema de los tres cuerpos también se define, asumiendo que se conocen los centros de masa,

dificultades en el cálculo de A22, aunque Rq es el jacobiano de la matriz R calculada para las variables dependientes, es decir, una hipermatriz de rango 9 x 3 x 9. Ambas matrices A21 y A22 resultan de rango 3 x 3.
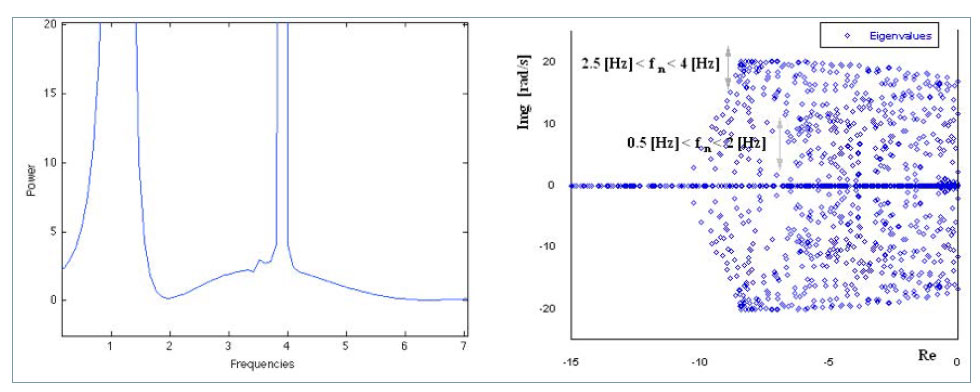
Los autovalores de A son obtenidos en la Figura 4 (a) mediante la representación por integración numérica de (21), cuando ambos links son colineales y se separan alrededor de 5 grados del punto vertical de equilibrio.
La figura 4 (b) muestra la transformada de Fourier de la señal correspondiente al ángulo ∅3, durante la integración numérica.
En ambas figuras se han identificado dos bandas de frecuencias naturales con centros en 1,17 [Hz] y 3,8 [Hz]. La primera es 0,7<fn<1,7 [Hz], mientras que la segunda 2,5<fn <4 [Hz]. Esto reafirma la idea de que el procedimiento adoptado para llevar a cabo los autovalores de la matriz jacobiana A del espacio de estados es una herramienta muy útil para identificar las bandas de frecuencias naturales donde los links tienden a vibrar. Además, se aprecia que el sistema no oscila a frecuencias mayores de 4,5 [Hz].
Shaper robusto limitador de la vibración
El objetivo principal de este trabajo es la creación de un Input Shaping adecuado al control de las vibraciones autoinducidas en los sistemas con dinámica multicuerpo.
Al tratarse de un transporte con carga en cabeza, implica un comportamiento oscilatorio de las cargas, que es una manifestación de los modos subamortiguados, excitados por la señal de entrada del carrito. Así, se empleará una técnica de control que da forma a dicha señal en anticipación a la respuesta esperada. Si el sistema está bien modelado esta será muy próxima a la respuesta real.
Una vez identificado el rango de frecuencia donde la carga multicuerpo tiende a vibrar, el siguiente paso es calcular separadamente un filtro de retardo (Input Shaper) para cada modo/banda y, después, convolucionar ambos filtros juntos para generar un bucle abierto de perfiles de velocidad para el carrito que satisfaga el objetivo deseado.
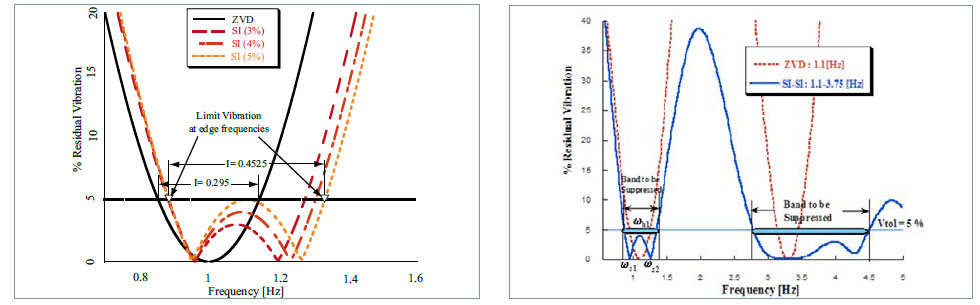
La figura 5 muestra varias curvas de sensibilidad, donde la amplitud de la vibración residual es ploteada en función de la frecuencia real. La curva negra corresponde al shaper ZVD. El eje vertical viene dado por la ecuación de la energía residual (35), mientras el horizontal es el rango de frecuencias correspondiente a la primera banda.

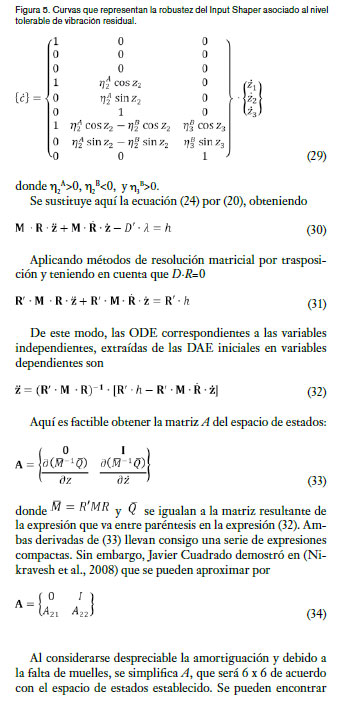
En la figura 6 se muestran las curvas de sensibilidad para el modo simple ZVD a 1,1 [Hz] y el modo doble SI-SI. Afortunadamente, la convolución total entre ambos shapers tiene efectos beneficiosos en cuanto a la robustez de la segunda banda de frecuencias. Los modos de vibración del sistema multicuerpo tienen los valores comprendidos entre 2,75 y 4,5 [Hz], mientras que la vibración residual permanecerá por debajo del nivel tolerable de amplitud de vibración. La razón puede estar en la contribución del primer shaper, ya que los de modo simple suprimen la vibración en múltiplos impares de su frecuencia de diseño, como muestra la curva del shaper ZVD a la frecuencia de 1,1 [Hz]. Así, las propiedades de vibración del primer shaper IS1,1 a múltiplos impares de frecuencias más altas son transmitidas al shaper SISI resultante.
De cualquier modo, entre 1,5 y 2,75 [Hz] el SI-SI convolucionado no mitiga la amplitud de la vibración residual, pero cuando se compara con el de la figura 4, el sistema multicuerpo no tiende a vibrar en dicha banda de frecuencias, así que el shaper SI-SI convolucionado atenúa la vibración en las bandas necesarias, lo que se corresponde con la filosofía de Input Shaping, que no tiene en cuenta el resto de las bandas de frecuencia en las que el sistema flexible no tiende a vibrar. Esta es la base de su superioridad cuando se compara con filtros de paso bajo o alto demostrados en (Singer et al, 1992).
Simulación y puesta en marcha de resultados experimentales
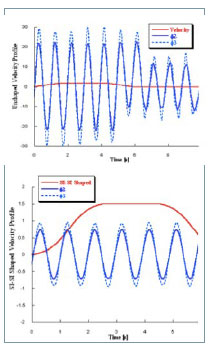
Los resultados de simulación de la figura 7 muestran una duración de 1,75 [s] para el shaper SI-SI. Sin embargo, el tiempo de subida de la rampa es 1,44 [s], es decir, 0,267 [s] más largo que la longitud del shaper SI-SI. Entonces, estos datos garantizan que la convolución total es matemáticamente viable, eficiente y eficaz.
La figura 7 (a) muestra las respuestas de las deflexiones angulares de los dos links (∅2 y ∅3) cuando el carrito trabaja bajo un perfil de velocidades unshaped. Hay una vibración significativa para las respuestas de ambos links. También la figura 7 (b) muestra las respuestas cuando el perfil de velocidades es conformado con el shaper SI-SI.
Nótese que, como se esperaba para el mismo rango de parámetros cinemáticos, la vibración residual en modo shaped siempre es pequeña. Si la amplitud de vibración en modo shaped se divide entre la vibración en modo unshaped, el porcentaje resultante de vibración es menor que el 5% para la deflexión angular de cada link.
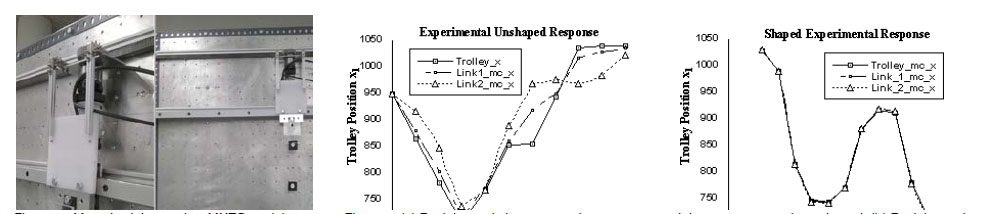
Para reforzar este resultado, se presentan a continuación las respuestas del prototipo real. Los experimentos fueron llevados a cabo en una minigrúa pórtico (MUTO: Multibody Two-link payload Overhead crane), representada en la figura 8. MUTO se compone de un patín fijado a una guía lineal, cuyo carrito está comandado por un servomotor unido, a su vez, al carrito por una placa de polipropileno y una estructura formada por perfiles de aluminio. El eje del servomotor tiene en su extremo un engranaje.
A mayores, se acopló un potenciómetro rotativo, actuando como unión del primer link con el carrito, sensor que mide la deflexión ∅2. El segundo link está conectado al primero por una segunda junta de revolución, esta vez sin potenciómetro acoplado, debido a que se añadiría una masa que falsearía los parámetros inerciales.
El driver del servomotor se conectó a un microcontrolador Mbed con un convertidor D/A. La señal de la velocidad es generada por ese Mbed. Además, MUTO puede moverse a distancia empleando un joystick cuyas órdenes alimentan a la Mbed.
Finalmente, la convolución total es llevada a cabo en tiempo real gracias a la introducción del shaper SI-SI en el programa C de la Mbed.
MUTO se hizo mover durante más de 10 [s] a través de su espacio de operaciones. Se recogieron los datos de las deflexiones ∅2 y ∅3 y se filmó, al mismo tiempo, la trayectoria de los centros de masas de ambos links (Fig. 8) de forma que se conociera la posición de los mismos frente al tiempo transcurrido. A pesar de optar por una frecuencia de muestreo limitada de alrededor de 30 [Hz], las respuestas a las órdenes filtradas y no filtradas (shaped y unshaped) se obtuvieron resultados que permit-en afirmar que la orden no filtrada causa desviaciones significativas de la posición x- del centro de masas de los links con respecto a la posición x- del carrito, mientras que la orden filtrada SI-SI elimina tal desviación entre los centros de masas, como se puede apreciar en la figura 9 (b).
Paralelamente, se analizaron las posiciones y- de los centros de masas. Aparecieron pequeñas vibraciones que no merecen un estudio más profundo, ya que pueden deberse a ciertas incertidumbres en la medida.
Conclusiones
Pese a haberse encontrado inicialmente dificultades a la hora de encontrar un método para obtener los autovalores, el jacobiano del espacio de estados ha permitido obtener las bandas de frecuencias de vibración del sistema multicuerpo.
La relación entre las DAE en variables dependientes correspondientes a las ODE en variables independientes se establece con ayuda del método de proyección de la matriz R para las velocidades. Entonces, se extrae la frecuencia natural circular por el método de integración hacia delante, a partir del modelo multicuerpo analítico de la grúa pórtico. Gracias a esto, se ha podido aplicar un filtro apropiado para conseguir obtener el objetivo que era la mitigación de vibración residual.
Para reforzar los resultados y la fiabilidad del análisis de los autovalores, se comprobó experimentalmente la deflexión experimental para las respuestas shaped y unshaped y se ha demostrado el efecto beneficioso de aplicar Input Shaping al generador de órdenes de una grúa pórtico.
Referencias
Book, W. (1993). Controlled Motion in an Elastic World, ASME J. Dyn. Sys., Meas., and Control, 115(2), June 1993.
Cuadrado, Javier; Dopico, Daniel; Pérez, José A.; Pastorino, Roland (2012).. Automotive observers based on multibody models and the extended Kalman filter, Multibody Syst. Dyn. 27:319 DOI 10.1007/s11044-011-9251-1.
García de Jalón, Javier; Bayo, Eduardo (1994).
Kinematic and Dynamic Simulation of Multibody Systems: The Real-Time challenge. Springer-Verlag, New York. ISBN 0-387-94096-0, 440 págs.
Junkins, J.L.; Kim, Y. (1993). Introduction to Dynamics and Control of Flexible Structures. AIAA, Washington D.C.
Neil, C.; Warren, P.; Seering, W.P. (1990). Preshaping command inputs to reduce system vibration. J. of Dynamics Sys., Measurement, and Control Vol. 112, pág. 7682.
Nikravesh, Parviz E. (2008). Planar Multibody Dynamics: Formultaion Programming and Applications. CRC Press Taylor and Francis Group.
Singer, N.C.; Seering, W.P. (1992). An extension of Command Shaping Methods for Controlling Residual Vibration Using Frequency Sampling, IEEE International Conference on Robotics and Automation. Nice, Francia, págs. 800-805.
Singhose, William E.; Vaughan, Josua (2011). Reducing Vibration by Digital Filtering and Input Shaping, IEEE Transactions on Control Systems Technology, Vol. 19, No 6, Noviembre.
Smith, O.J.M. (1957). Posicast control of damped oscillatory systems. Proceedings of the IRE, págs. 1249-1255.