
Diseño de una plantadora mecánica de patatas
Existe una gran cantidad de máquinas plantadoras de patatas, desde semiautomáticas que requieren la presencia de un operario, hasta completamente automáticas provistas de la más moderna tecnología electrónica. El empleo de una máquina u otra depende, principalmente, de la extensión de la superficie que se ha de cultivar (por la rentabilidad de la máquina). La mejora en la eficiencia de estas máquinas supone beneficios tanto para el agricultor como para el medio ambiente. En este trabajo se diseña una plantadora accionada y controlada únicamente mediante elementos mecánicos y que permita regular todos los parámetros que intervienen en el proceso de plantación de patatas, por lo que se convierte en apta para un amplio abanico de explotaciones. El resultado es un diseño versátil que conjuga la sencillez, la fiabilidad y el fácil mantenimiento de una máquina puramente mecánica con la precisión, velocidad y control del proceso de las más sofisticadas máquinas controladas de forma electrónica.
Recibido: 30 de septiembre de 2010
Aceptado: 30 de noviembre de 2010
Palabras clave
Maquinaria, agricultura, automatización, mecanización
ABSTRACT
There is a great variety of potato planters, from semiautomatic, that need the presence of a workman, even completely automatic provided with the most modern electronic technology. The employment of a machine or another depends principally on the extension of the surface to cultivate (profitability of the machine). The improvement in the efficiency of these machines is beneficial both to the agrarian and the environment. In this work, a planter is designed to be driven and controlled only mechanically, which allows regulating all the parameters in the potato planting process, being suitable for a variety of crops. The result is a versatile design that brings together the simplicity, reliability and easy maintenance of a purely mechanical machine with the precision, speed and control of the process of the most sophisticated machines controlled of electronic form.
Received: September 30, 2010
Accepted: November 30, 2010
Keywords
Machinery, agriculture, automation, mechanization
Introducción
Para conseguir una producción de patatas rentable se deben planificar muchas labores. Uno de los aspectos más importantes es la plantación, en el que es imprescindible la combinación adecuada de cuatro factores: una patata de siembra sana y de la correcta edad fisiológica, un lecho adecuado, una fecha adecuada para la plantación y una plantación cuidadosa (Baarveld et al, 2002). El método lento y laborioso de plantar manualmente las patatas ha sido sustituido en gran parte por plantadoras total o parcialmente automáticas (figura 1), que abren un surco, colocan las patatas de siembra a la distancia conveniente, abonan si es necesario y cubren el tubérculo con la profundidad de tierra precisa.
Hay una gran diversidad de máquinas plantadoras de patatas. En pequeñas y medianas explotaciones aún siguen empleándose las mecánicas, sencillas y de bajo coste; mientras que en grandes explotaciones, la maquinaria moderna hace uso de sensores y actuadores controlados electrónicamente que permiten regular todos los parámetros de la plantación. Si bien estas últimas máquinas consiguen una mayor uniformidad en la plantación y minimizan los daños a los brotes del tubérculo, las plantadoras mecánicas poseen una mayor robustez, bajo coste y fácil mantenimiento. En los tiempos difíciles que corren hoy en día para el agricultor y para el medio ambiente, la optimización de las máquinas mecánicas, e incluso el retorno a su uso en ciertas explotaciones, puede suponer una mayor eficiencia, con el consiguiente impacto ambiental menor. En este proyecto, en el que han colaborado alumnos de ingeniería técnica industrial e ingeniería técnica agrícola de la Universidad de Burgos bajo la dirección del autor, se ha pretendido tomar lo mejor de las máquinas existentes en el mercado para diseñar una plantadora mecánica tan eficiente como las más modernas, que permita regular todos los parámetros que intervienen en el proceso de plantación y hacerla así apta para todo tipo de explotaciones.
Descripión de la máquina
Tras un análisis detallado del proceso de plantación y de las características de los modelos de máquinas plantadoras existentes en el mercado, se obtuvieron las siguientes características exigibles al diseño de la máquina plantadora de patatas:
-Plantación uniforme, sin fallos ni plantas múltiples, aunque varíe la velocidad.
– No producir daños a los brotes del tubérculo.
– Adaptabilidad a la plantación simultánea de distinto número de surcos.
– Regulación de la separación entre surcos.
– Regulación de la distancia entre tubérculos en el surco.
– Ajuste de la profundidad y el recubrimiento de los tubérculos.
– Posibilidad de acoplar un distribuidor de gránulos (plaguicida o fertilizante).
– Autonomía para reducir al mínimo los tiempos muertos.
– Adaptación al relieve del terreno.
– Polivalencia para otro tipo de cultivos (como cebollas o ajos).
– Adaptabilidad a grandes y pequeños tractores.
– Interrupción del proceso y sistema antirretorno cuando el tractor da marcha atrás.
– Facilidad de llenado, vaciado, mantenimiento y transporte.
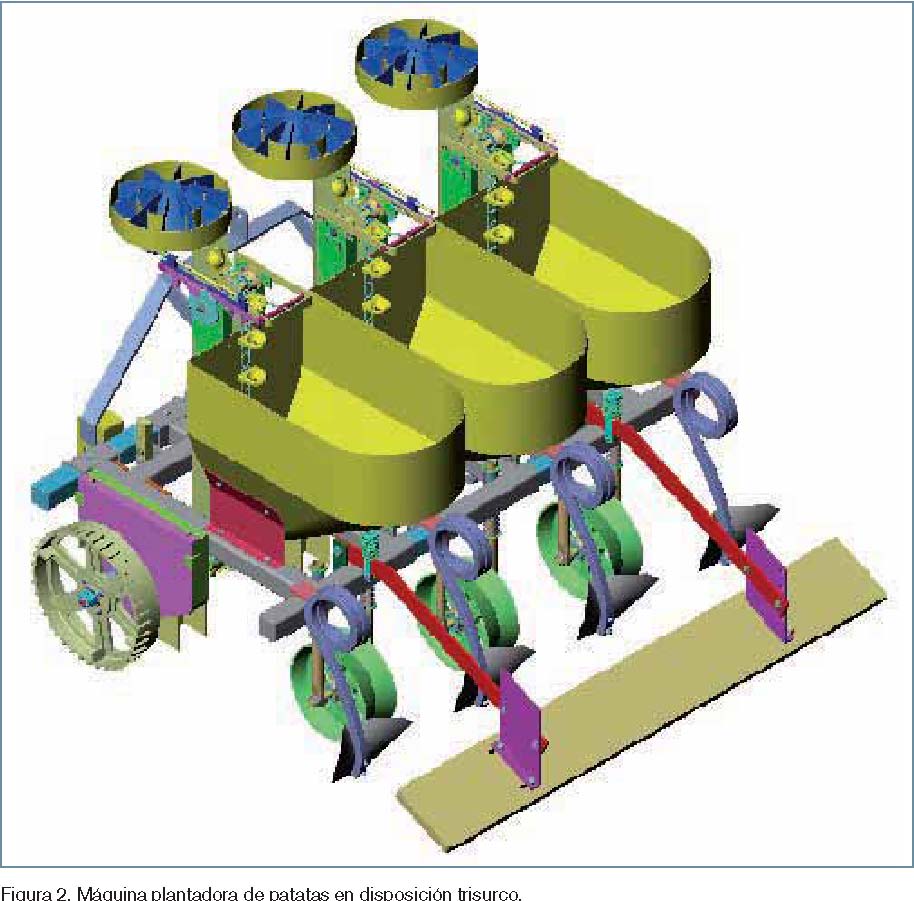
A continuación, se describen las principales características de la máquina, cuyo primer diseño puede observarse en la figura 2.
Sistema de transmisión de potencia
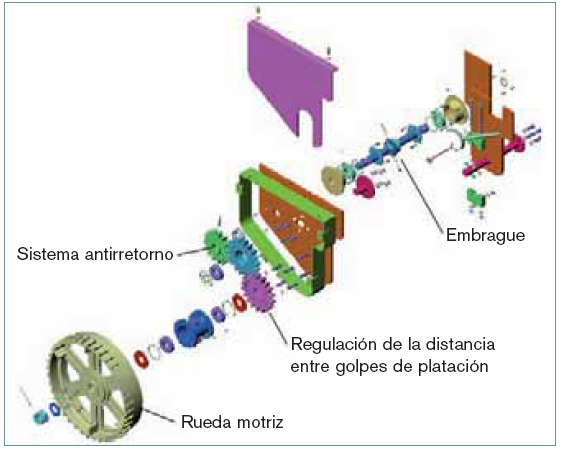
El accionamiento de todo el mecanismo se realiza mediante las ruedas portadoras del conjunto, que transmiten el movimiento al sistema de alimentación de patatas. De esta forma, se conserva la uniformidad de plantación independientemente de la velocidad del tractor. La transmisión incluye un sistema antirretorno, embrague de desconexión y tren de engranajes para la regulación de la distancia entre golpes de plantación (figura 3).

Sistema de alimientación
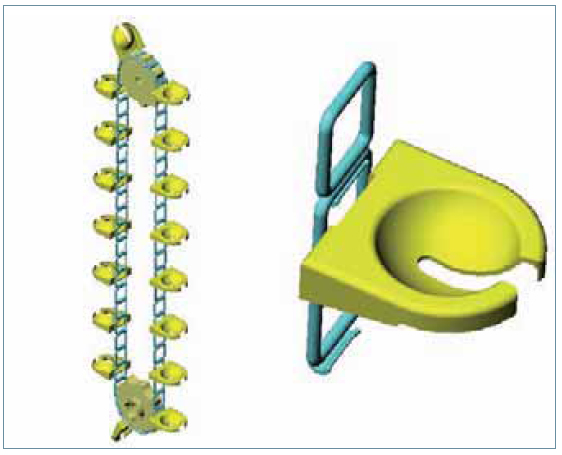
El sistema empleado para la alimentación automática es el de cadena de cangilones (figura 4). Los cangilones tienen forma de cuchara ampliamente dimensionada que toma, al pasar por la cámara de distribución, una o varias patatas. Al salir de la cámara un solo tubérculo queda sobre el cangilón y los demás caen de nuevo a la tolva. Las patatas utilizadas han de ser de tipo redondeado (factor de forma inferior a 0,25) y calibradas, que es la forma en que habitualmente se suministran para siembra.
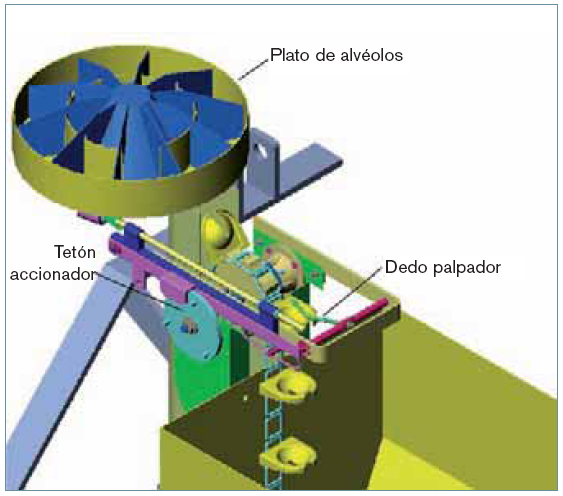
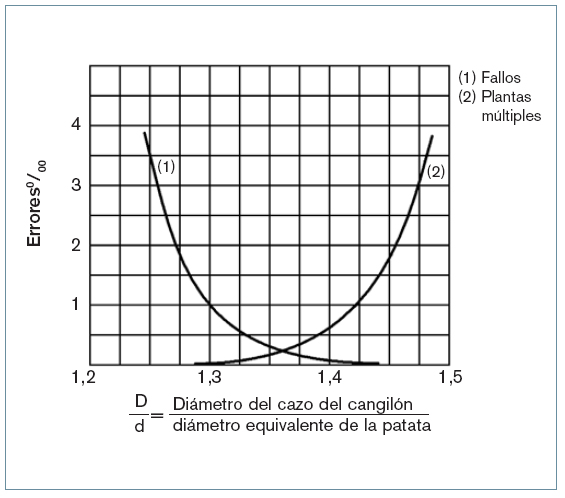
Para la adaptación de distintos tamaños de patatas la cadena de cangilones es intercambiable. Aun así, siempre es necesario un sistema corrector de errores, pues puede producirse tanto un fallo (cangilón vacío) como una plantación múltiple (dos patatas en el cangilón). El sistema corrector empleado (figura 5) consiste en un plato de alvéolos con capacidad para 20 tubérculos. En el recorrido de la cadena un dedo palpador controla la presencia de patata en el cangilón. En caso de falta, el palpador acciona el sistema corrector, que deposita una patata en el cangilón vacío.
Este sistema corrige los fallos, pero no las plantaciones múltiples; para ello el diámetro del cazo del cangilón no debe ser superior a 1,3 respecto al de la patata calibrada (figura 6). La capacidad del plato de alvéolos es la adecuada a la capacidad máxima de la tolva, de modo que la carga de ambos depósitos se realizará en la misma parada (Ortiz Cañabate et al, 1989; Ortiz Cañavate, 1995).
Regulación de la separación entre surcos
Dependiendo de las condiciones de crecimiento de la planta (tipo de suelo, temperatura, humedad, etcétera), es necesario regular la distancia entre surcos. Unas condiciones favorables permiten menor separación y, por tanto, mejor distribución de tallos. Cuando las condiciones son desfavorables, es necesario hacer caballones grandes que protejan los tubérculos, para lo cual la distancia entre surcos debe ser mayor (Baarveld et al, 2002). La regulación de la distancia entre surcos se consigue mediante el desplazamiento de los elementos a lo largo del chasis y la eliminación de alguna de las tolvas, teniendo siempre en cuenta que el ancho de vía de las ruedas del tractor debe ser múltiplo de la separación entre surcos. Como, a su vez, la inmensa mayoría de los modelos de tractores tienen dispositivos para poder variar el ancho de vía (Guadilla, 1989), la combinación de ambos factores permite cultivar en sur-cos separados dentro del rango usual, de 50 cm a 100 cm.
Regulación de la distancia entre tubérculos en el surco
Los agricultores que deseen producir patatas de tamaño pequeño (28-45 mm) para venderlas como patatas de siembra deben obtener una densidad de tallos elevada, entre 30 y 45 tallos por metro cuadrado (dependiendo de la variedad, del suelo y del clima). Para producir tubérculos grandes (> 55 mm) para su venta a la industria, es suficiente con obtener entre 15 y 20 tallos por metro cuadrado. La media de brotes del tubérculo que se planta da una idea fiable del número de tallos que se pueden esperar. Todo esto determina la distancia necesaria entre los tubérculos en el surco (Baarveld et al, 2002).

La distancia entre golpes de plantación se modifica variando la velocidad del distribuidor, para lo cual la máquina está equipada con una serie de engranajes (véase la figura 7) que permiten modificar el número de vueltas del distribuidor para una misma longitud de terreno recorrida por la máquina. La intercambiabilidad del juego de engranajes facilita la regulación de la distancia entre golpes en el margen usual, de 20 cm a 60 cm. En la misma figura 7 se observa el sistema antirretorno de la cadena de cangilones, consistente en un pasador que evita la transmisión de movimiento cuando el tractor realiza alguna maniobra marcha atrás.
Ajuste de la profundidad y el recubrimiento de los tubérculos
La profundidad a la que se entierra el tubérculo debe adaptarse a las condiciones del suelo. En condiciones de crecimiento nor-males, el tubérculo deberá estar a ras de la superficie, a unos 5 cm (figura 8). Como el suelo en las capas más profundas se seca más lentamente que en la superficie, en condiciones secas se deben sembrar los tubérculos a mayor profundidad (Ortiz Cañabate et al, 1989; Ortiz Cañavate, 1995). La mayor profundidad también es importante para luchar contra la polilla de la patata (Baarveld et al, 2002). Por el contrario, se tendrá que pasar una gran cantidad de tierra por la arrancadora durante la recolección mecánica, situación problemática cuando el suelo sea pesado. La regulación de la profundidad y el recubrimiento de los tubérculos se realiza con los husillos que modifican la posición de las rejas con respecto al chasis de la máquina.

Otras características
Aparte del control de los parámetros de colocación de la patata en la tierra, otros sistemas con los que está equipada la máquina son:
– Sistema antirretorno para que no funcione en sentido inverso.
– Embrague de desconexión.
– Sistema de enganche universal para todo tipo de tractores.
– Accesorio abonador o distribuidor de gránulos.
Conclusiones
La mayoría de pequeñas y medianas explotaciones usan máquinas rudimentarias, muchas veces de tipo semiautomático. En gran parte de estas explotaciones se podría incrementar notablemente la producción y reducir costes en maquinaria y mantenimiento. Esta ineficiencia se debe, en unas ocasiones, al desconocimiento de las variables que afectan a la plantación de la patata, y, en otras, a que la maquinaria no permite el control de dichas variables. Por el contrario, en las grandes explotaciones el agricultor suele tener a su disposición la más moderna tecnología para controlar minuciosamente todos los factores de la plantación, con un mayor coste.
El diseño expuesto mantiene la simplicidad, bajo coste y fácil mantenimiento de una máquina mecánica como las que se emplean en la actualidad en pequeñas y medianas explotaciones; pero a diferencia de éstas, permite una flexibilidad total en la regulación de los parámetros de plantación.
Agradecimientos
A los estudiantes participantes en este trabajo: Laura Moreno Delgado, Alberto Bernal Bernal y Rubén Martínez Saldaña.
Bibliografía
Baarveld HR, Peeten HMG, Sterk TA (2002). El cultivo de patatas profesional. Editorial NIVAA, Zoetermeer, Holanda.
Guadilla A (1989). Tractores: mecánica, reparación y mantenimiento. Ediciones CEAC, Barcelona, España.
Ortiz Cañavate J, Hernanz JL (1989). Técnica de la mecanización agraria. Ediciones Mundi-Prensa, Madrid, España.
Ortiz Cañavate J (1995). Las máquinas agrícolas y su aplicación, Ediciones Mundi-Prensa, Madrid, España.