Control y adquisición de datos en la línea española del sincrotrón de Grenoble
La línea española (SpLine) del European Synchrotron Radiation Facility (ESRF) de Grenoble dispone de un avanzado y eficiente sistema de control
Un sistema SCADA ha sido desarrollado para la línea española (BM25) del ESRF (Grenoble – Francia). El sistema se basa en bus VME, arquitectura Motorola PreP (PowerPC reference platform) y sistema operativo Linux; está conectado a una red ethernet, la cual se comunica con los servidores (PC workstations). En estos ordenadores, los datos están disponibles para poder analizarlos. La adquisición de datos consiste en muchos canales conectados a los crates VME, independiente estre ellos, programables mediante drivers e interfaces de usuario gráficas (GUI), y un conjunto de sistemas independientes (embedded, PLCs, etc) controlan los aspectos de la seguridad.
Antecedentes
El proyecto principal al que pertenece el presente proyecto Construcción de una línea española de experimentación en el ESRF o European Synchrotron Facility ( internet: www.esrf.fr/exp_facilities/bm25/handbook.html, se solicita para llevar a cabo la construcción de una línea de trabajo española permanente en el sincrotrón europeo de Grenoble (Francia), el European Synchrotron Radiation Facility o ESRF.
La construcción de dicha línea (figura 1) se acordó entre la Secretaría General del Plan Nacional de Investigación Científica y Desarrollo Tecnológico de la Comisión Interministerial de Ciencia y Tecnología y la Dirección del ESRF mediante la firma de un contrato de construcción el 14 de Noviembre de 1997, sobre la base de un proyecto elaborado durante los dos años anteriores y aprobado por el Consejo del ESRF el 6 de junio de 1997.
La finalidad de la línea española en el ESRF es atender las necesidades crecientes de uso de la radiación sincrotrón por la comunidad científica española en muy diversas áreas, dado que el tiempo de máquina correspondiente a España, actualmente el 4%, es insuficiente.
La línea consta de dos ramas con un total de cinco estaciones de trabajo correspondientes a las siguientes técnicas: absorción de rayos X, difracción de rayos X por muestras en polvo, difracción por monocristales y superficies, difracción a bajos ángulos y estudio de macromoléculas y proteínas.
El proyecto se articula mediante la coordinación de siete subproyectos, de los cuales cinco corresponden a las mencionadas técnicas y dos a instalaciones generales. Cada subproyecto será realizado por una institución científica española bajo la dirección de un investigador responsable y con la colaboración, siempre que sea posible, de industrias y empresas españolas, con el fin de optimizar el retorno tecnológico. Siendo el subproyecto que se presenta el correspondiente al número dos llamado Sistema de Control y Adquisición de Datos de la Línea Española del ESRF (SpLine), llevado a cabo por el Ciemat. El plazo de construcción de dicha línea comprende desde enero de 1999 hasta diciembre del 2004.
Introducción
El objetivo primordial del sistema de control y adquisición de datos de la línea BM25 de rayos X es la de facilitar los medios técnicos necesarios a la comunidad científica española para poder acometer eficientemente sus mediciones y la posterior salvaguarda e integridad de la información. Tal objetivo se ha cumplido y actualmente el sistema de control está operativo y a disponibilidad de dicha comunidad científica. Para abarcar distintas áreas de investigación y que fuera interdisciplinar y multipropósito, la línea española BM25 CRG, está formada por dos ramas, A y B. Cada rama trabaja de modo independiente, tanto a nivel operativo, como de control. El sistema de control es distribuido, y el medio de integración es una red ether-net de area local autónoma e independiente.

La comunicación con otros grupos, y el mundo exterior se realiza a través de un switch. Éste, permite también la comunicación con el grupo de control de la máquina, dando así acceso a parámetros tales como intensidad de corriente, etc. Se utiliza una aplicación X-Window para controlar el modo del shutter (automático o no). Cada rama posee una máquina GNU/Linux, en la que se ejecutan programas, bien sobre una interfaz gráfica (GUI) X11/KDE, bien sobre una interfaz de línea de comandos (CLUI), como SPEC. Dicha máquina se utiliza para gestionar el control de la rama, y también para adquisición de datos.
Otros PCs se encuentran dedicados al control de experimentos y a la adquisición de datos, así como a su análisis preliminar. En cuanto al hardware, se utilizan crates VME dirigidos por tarjetas Motorola MVME2434, basados en una CPU PowerPC, y sobre los que se ejecuta el sistema operativo Debian GNU/Linux.
Por cada rama se dedica un crate al control de los elementos ópticos de la línea (espejos, rendijas, atenuadores, etc), y otros al control de los elementos experimentales (difractómetros, analizadores, etc). Dichos crates se ocupan de gobernar los motores de los equipos de la línea, así como la mayoría de las restantes señales de entrada/salida. Se pueden utilizar otros dispositivos (GPIB, líneas serie, USB, etc.), que se conectarán a la red de área local de la línea mediante su correspondiente conversor.
El sistema de seguridad se basa en autómatas programables (PLCs). Dichos autómatas se ocupan del control del sistema de vacío de la línea y control de personal. Se accede a ellos mediante líneas serie, proporcionadas por PCs industriales, que pueden, a su vez, trabajar como sistemas independientes. El sistema de control permite el uso de sistemas comerciales de adquisición de datos (Multi-Channel Analyzer, cámaras CCD, Image Plate Scanner, etc).
Electrónica de control
Cumpliendo con los objetivos iniciales se ha mantenido la electrónica de control estándar dentro del ESRF a excepción de las tarjetas procesadoras que se ha optado por PowerPC. El sistema realizado, permite controlar diferentes tipos de señales como entradas y salidas analógicas, entradas y salidas digitales, líneas serie, motores paso a paso, etc.
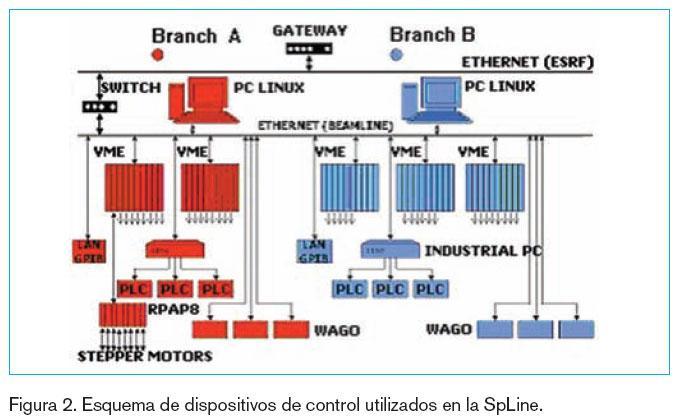
Para la rama A el control se realiza mediante 2 crates VME, 1 servidor PC y 1 PC industrial mientras que para la rama B existen 2 PC Server y 3 crates VME. (Fig. 2)
El total de tarjetas de control utilizadas en los crates VME son las siguientes:
- 5 MVME2434 (Tarjetas procesadoras PPC)
- 21 VPAP (Tarjetas controladoras de motores paso a paso)
- 144 DPAP2 (Control bipolar de motores paso a paso)
- 24 DPAP7 (Tarjetas controladoras de motores con alta intensidad de corriente)
- 7 CC133 (Controladoras de encoders incrementales)
- 4 VCT6 (Tarjetas contadoras)
- 2 A201S (Entradas-Salidas analógicas de 16 bits).
Se utilizan tambien dispositivos GPIB conectados directamente a la red Ethernet; los aspectos de la seguridad están comandados por PLCs (instrumentación de vacío, seguridad del personal, etc), estos PLCs se gobiernan por lineas serie conectados a PCs industriales, los cuales también se utilizan para sistemas de adquisición de datos comerciales: Multi-Channel Analyzer, CCD camera, Image plate scanner, etc. (figura 2).
Sistema de control distribuido
Cada rama posee un sistema de control independiente y distribuido, basado en una arquitectura cliente-servidor. El lado cliente corresponde a crates VME, y el lado servidor a estaciones de trabajo PC-Linux. La interfaz de usuario puede ser de tipo texto (CLUI) ó gráfica (GUI), que permite un uso rápido e intuitivo.
El sistema de control y de adquisición de datos, (basado en PowerPC CPU MVME2434 con GNU/Linux) , es especialmente efectivo para la manipulación de múltiples procesos y tratamientos de datos. Tal sistema permite controlar diferentes señales (control de motores paso a paso, entrada salida analógica/digital, etc).

Spec (http://www.esrf.fr/computing/bliss/documentation/documentation.html#spec) es un programa para Unix/Linux, utilizado para el control de instrumentación y adquisición de datos, de uso generalizado en experimentos de difracción de rayos-X y sincrotrones de todo el mundo, así como en universidades y laboratorios industriales. Puede ser ejecutado desde un ordenador cliente remoto. Posee una interfaz CLUI, mediante la cual los usuarios se comunican con todos los
dispositivos instalados en la linea. TACO, un sistema de control orientado a objetos distribuidos, desarrollado en el ESRF, (http://www.esrf.fr/computing/cs/taco/taco.html) se instala en el servidor de los crates VME, y es utilizado por Spec y los device servers (objetos
que manejan procesos de entrada salida) (http://www.esrf.fr/computing/cs/device_servers/Keywords.html).
Los drivers y device servers se ejecutan en los crates VME, y han sido portados a PowerPC por el “Bliss Group” del ESRF.
Sistema operativo sin disco
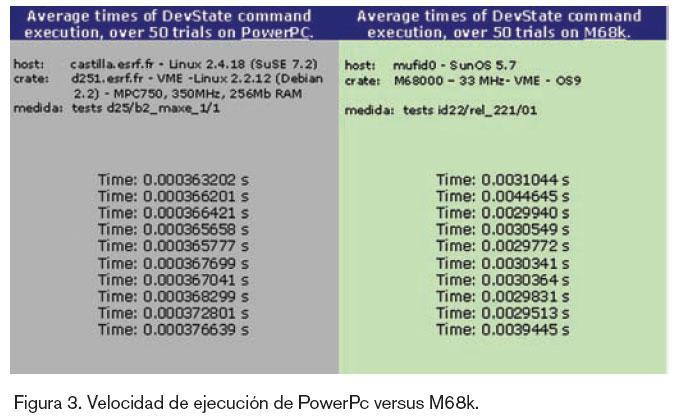
Se utiliza la distribución Debian GNU/Linux basado en kernel 2.2.12 sobre PowerPC. Es un sustituto apropiado y fiable para los sistemas OS9 sobre máquinas M68K, utilizados en el ESRF. Nuestro hardware y sistema operativo incrementan la velocidad de ejecución con respecto a estos antiguos sistemas – ejem. 0,3 ms versus 3,1 ms, al ejecutar desde spec un comando DevState sobre una tarjeta controladora de motor (figura 3). Además, la conexión de red es ahora más rápida (100Mbps) que en la arquitectura 68K-OS9 (10Mbps). No es un sistema operativo en tiempo real, sin embargo, permite soportar extensiones de tiempo real, como por ejemplo RTAI.
Linux es la interfaz entre el software y los dispositivos. Los drivers corren en el espacio del Kernel y se cargan como módulos del mismo. Otros procesos (device servers, etc) se comunican con los drivers desde el espacio de usuario.
Los crates VME trabajan en modo “sin disco”. Son clientes de un servidor NFS, que les suministra un sistema de ficheros.
Resultados más relevantes
El principal resultado del proyecto es que se ha conseguido completar y facilitar la disponibilidad de herramientas y médios técnicos con los que poder realizar el control y las mediciones sobre toda la instrumentación de la línea.
Puntos intesantes a destacar son los dos siguientes:
Control del sistema neumático del monocromador
El monocromador es de tipo pseudochannel Cut (DCM). El alineamiento del segundo cristal se realiza por medio de tres rotaciones (Yaw, Roll y Pitch). Dichas rotaciones se obtienen a través de un sistema de levas. Requieren una carrera de 1 mm, que se consigue mediante un sistema neumático.
La presión se regula controlando el flujo entrante (Sin) y el flujo saliente (Sout) en un recipiente (reservoir). Dicha presión es proporcional a (Sin – Sout).
Sin se regula con un PID, via una válvula electroneumática. Un convertidor DAC de 16-bits se utiliza para cambiar el flujo entrante, Sin.
La resolución es de 0.019 mm/step (0.15 mbar/step), y la precisión es de 5 mm.
Hemos desarrollado drivers y device servers propios para las nuevas tarjetas DAC y ADC de 16-bits utilizadas en dicho control.
Sistema de control eficiente e innovador
El sistema construido es un sistema eficiente para manejar más de 140 stepper motors, 50 encoders incrementales y más de 200 señales electrónicas de control. A partir del debate abierto en el ESRF para la implantación de una nueva arquitectura de control más moderna que la actualmente instalada en las líneas y comprobada la eficiencia y valided del presente proyecto, el computing service del ESRF ha decicido adoptar el sistema de control realizado en este proyecto como punto de referencia para sus nuevos desarrollos.
Conclusiones
El sistema de control y adquisición de datos de la línea cumple con los objetivos iniciales propuestos en cuanto:
- Interfaz con el sistema de seguridad y control del ESRF
- Control de elementos mecánicos.
- Control de sensores.
- Interfaz de usuario.
- Conexión a la red informática del ESRF.
De las diferentes arquitecturas propuestas en un principio para el desarrollo de este proyecto, se ha optado por desechar la implantada desde los inicios del ESRF, OS9-M68k debido a que esta tecnología es obsoleta y existía un debate dentro del ESRF para actualizar dichos sistemas. No obstante y a pesar de utilizar otras plataformas se ha conseguido mantener la compatibilidad con las demas líneas de la instalación como son:
- Utilización gratuita del software existente.
- Disponibilidad de repuestos (al mantener la misma electrónica, excepto la CPU)
- Disponibilidad del software de alto nivel SPEC para el manejo del sistema.
- Disponibilidad de experiencia hardware y software en el entorno del ESRF.
Bibliografía
Castro G.R. (1997). Spanish X-Ray Bamline for Absorption and Diffraction. Spanish CRG. Comisión Inter-ministerial de Ciencia y Tecnología – CYCIT. Madrid. Abril, 1997.
Fajardo P. (1999). The Evolution of the Beamline Control System. A Proposal. Instrument Support Group. ESRF. October, 1999.
Gotz A., Makijarvi P., Regad B., Perez M., Mangiagalli
P. (1999). Embedding Linux to Control Accelerators and Experiments. Linux Journal issue 66. October, 1999.
Homs A. (2000). Overview of the ESRF Beamline Linux Control System. Bliss Group. ESRF. Paubert G. (2002). A Linux driver for Tundra’s Universe (bridge between PCI and VME buses). June, 2002 Rubini A., Corbet J. (2001). Linux Device Drivers. O’Reilly. ISBN 0-596-00008-1. Junio, 2001.
RESUMEN
Un sistema SCADA ha sido desarrollado para la línea española (BM25) del ESRF (Grenoble – Francia). El sistema se basa en bus VME, arquitectura Motorola PreP (PowerPC reference platform) y sistema operativo Linux; está conectado a una red ethernet, la cual se comunica con los servidores (PC workstations). En estos ordenadores, los datos están disponibles para poder analizarlos. La adquisición de datos consiste en muchos canales conectados a los crates VME, independiente estre ellos, programables mediante drivers e interfaces de usuario gráficas (GUI), y un conjunto de sistemas independientes (embedded, PLCs, etc) controlan los aspectos de la seguridad.