
Ajuste de parámetros PID en lazos de control de procesos industriales
RESUMEN
El comportamiento temporal de un lazo de control constituye habitualmente un tema que ocupa y preocupa al operador de planta, habida cuenta de que una mala determinación de los parámetros que caracterizan las componentes de la acción de control tiene, en muchos casos, un efecto no deseado sobre la respuesta del sistema y la estabilidad de las variables de proceso. Sin profundizar en la abundante literatura matemática que aborda la teoría de control y la dinámica de sistemas, es posible poner en práctica unos procedimientos y apuntar reglas simples que permitan establecer con ciertas garantías el valor de los parámetros que describen el comportamiento del lazo de control. Una de las acciones de control más comúnmente utilizada en la regulación de variables de proceso es la acción combinada P+I+D. Este artículo recoge dos métodos prácticos que permitirán calcular los valores de las componentes básicas de esta acción (la proporcional, la integral y la derivativa) y establecer una aceptable ponderación entre ellas para formar la acción global de control que debe generar el dispositivo de regulación.
Palabras clave
Control de procesos, lazos de control, controlador PID, plantas industriales.
ABSTRACT
The temporal behaviour of a control loop, usually constitutes a subject of concern for plant operators, due to the fact that a misjudgement of the parameters defining the components of the control action can have, in many cases, an undesirable effect on the system response and the stability of the process variables. Without going into any depth on the abundant mathematical literature on the subject of systems dynamics and control theory, it is possible to put into practice certain procedures, and to highlight simple rules which permit the establishment, with certain guarantees, of the value of the parameters which determine the behaviour of the control loop. One of the most commonly used control actions in the regulation of process variables is the combined action P+I+D. This article includes two practical methods for calculating the values of the basic components of this action (the proportional, the integral and the derivative) and establish an acceptable weighting between them to form the global control action generated by the regulatory mechanism.
Keywords
Process control, control loops, PID controller, industrial plants.
Ajuste del lazo de control
Una acción de control PID (proporcional integral derivativo)1 viene caracterizada por la expresión:

El primer sumando de esta expresión es una componente que participa en la acción global con un peso proporcional a la diferencia entre la consigna y la medida (ε = error). Al parámetro KP se le denomina factor proporcional o ganancia y, en muchos casos, viene expresado como la inversa de la denominada banda proporcional (BP).
El segundo sumando, denominado de acción integral, participa en la expresión con un peso proporcional a la permanencia del error en el tiempo. El parámetro TI es el tiempo integral en minutos por repetición y el cociente KP/TI, también llamado factor de acción integral, KI, viene dado habitualmente en repeticiones por minuto, esto es, las veces que la componente de acción integral contiene a la componente de acción proporcional KP en un minuto.
El tercer sumando, denominado de acción derivativa, participa en la acción global de forma proporcional a la rapidez de cambio del error. El parámetro TD es el tiempo derivativo en minutos y el producto KP·TD, denominado factor de acción derivativa (KD), aporta una acción anticipativa equivalente a la componente de acción proporcional KP en un tiempo TD.
La constante N se corresponde con la acción de control que debe proporcionar el controlador con una señal de error nula.
Caso práctico
Considérese el siguiente caso práctico: se desea acondicionar una determinada zona, regulando el caudal del aire frío de entrada a través de una trampilla (damper) sobre la que actúa la acción correctora, de tipo PID, generada por un controlador que toma la señal de medida de un transmisor de temperatura expuesto al ambiente (figura 1).
El controlador dispone de los potenciómetros de ganancia, tiempo integral y tiempo derivativo, que deben ser ajustados de forma apropiada para obtener una diferencia reducida entre el valor de consigna (18,0 ºC) y el de medida (24,5 ºC) y, además, sin que se produzcan oscilaciones importantes de temperatura en la zona. Inmediatamente surge la pregunta: ¿en qué posición se han de colocar los potenciómetros? Antes de responder a la pregunta es conveniente conocer algunos detalles:
a) En algunos controladores el potenciómetro que modifica la acción proporcional viene indicado en términos de banda proporcional (BP), en lugar de ganancia (KP). Si es así, hay que recordar que la banda proporcional es:

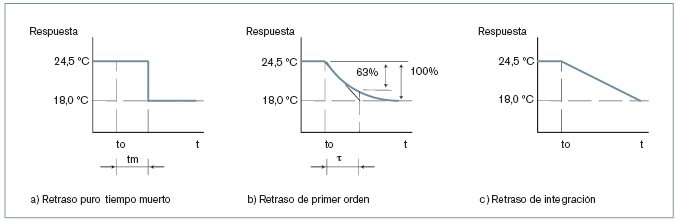
b) Si la temperatura de la zona es, por ejemplo, de 24,5 ºC y el damper se encuentra cerrado, es previsible que al abrirlo en el instante to, la temperatura que muestra el visualizador del controlador, evolucione de cualquiera de las maneras que muestran las gráficas de la figura 2, o de acuerdo a una combinación de ellas2.
Si la temperatura evoluciona como se muestra en la figura 2a, puede asegurarse que se trata de un sistema con un retraso puro (tiempo muerto). Habitualmente, este retraso es el tiempo de transporte de materia y/o energía de un lugar a otro y, en este caso, puede entenderse que se trata del tiempo ™ que tarda el aire frío en llegar al sensor de temperatura, es decir, en recorrer la distancia d. La gráfica indica también que el sistema respondería de forma inmediata al contacto del aire frío con el sensor. En la práctica esto no sucede nunca.
Suponiendo una distancia d igual a cero, esto es, el sensor ubicado a la salida del damper, y que el sistema responde como muestra la figura 2b, se estaría en condiciones de afirmar que el sistema presenta un retraso de primer orden. En esta situación, se produce el 63% de la respuesta en un tiempo (τ) denominado constante de tiempo del sistema. Habitual-mente, este retraso es atribuible, en su forma más simple, a la inercia de respuesta que presenta el elemento de medida.
Si se mantiene una distancia d igual a cero y se observa una respuesta como la que indica la gráfica de la figura 2c, se estará en presencia de un sistema con retraso de integración producido, en este caso, por la acumulación de energía que se da en los elementos de la cadena de medida (sensor, transductor, etcétera).

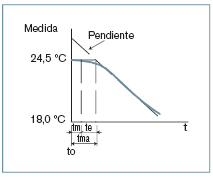
La respuesta real del sistema (incluidos los retrasos del controlador) al abrir el damper se aproximará más a la curva que se muestra en la figura 3. La curva recoge el conjunto de retrasos descritos; el tiempo muerto puro ™, los posibles retrasos de primer orden (te) y el retraso de integración. A la suma del tiempo muerto puro más la suma de retrasos de primer orden se le denomina tiempo muerto aparente (tma).
Ajuste de parámetros PID en lazo abierto
Supongamos que el controlador de la figura 1 genera una acción correctora en intensidad dentro del rango de 4 a 20 mA, de tal manera que con una salida de 4 mA el damper se encuentra totalmente cerrado y con 20 mA el damper está completamente abierto. Hay que considerar que el campo de medida del controlador va de 0,0 ºC a 70,0 ºC (alcance = 70 ºC).
Si el controlador se coloca en posición manual (actuando sólo como indicador y con su salida desconectada) y en el instante to se le aplica al damper una corriente constante, por ejemplo de 10 mA, que lo lleve desde su posición de cierre completo a cualquier otra posición intermedia, cabe esperar una curva con la forma que se muestra en la figura 4. Imagínese que la gráfica se ha confeccionado a partir de los valores de la temperatura ambiente leída cada minuto.
El valor de tma obtenido es sumamente importante. Es el valor de tiempo leído en el punto de intersección de la pendiente de la curva con la recta horizontal en el origen del ensayo. En este caso, dicho valor es de 4 minutos.
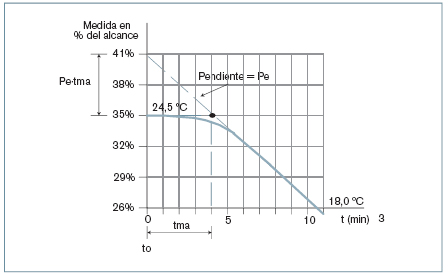
Con objeto de normalizar los cálculos3, el eje y de la gráfica se tabula en tanto por ciento del valor de medida respecto del alcance de escala del controlador. Así pues, para una temperatura de 24,5 ºC y de 18,0 ºC se tendrá:

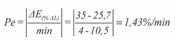
El valor de la pendiente (Pe) se puede encontrar trazando la tangente a la curva entre dos valores cualesquiera lo suficientemente distantes:
Ahora será necesario calcular un parámetro que relaciona la entrada y salida normalizadas del controlador:

Donde S(% AL) es el escalón de corriente aplicado al damper, en % del alcance de salida del controlador.
El parámetro S(% AL) se calcula teniendo en cuenta la variación de acción correctora a la que se sometió el damper. Si el alcance de salida del controlador es 20-4=16 mA, y estando cerrado (4 mA) se le proporcionó 10 mA, se tendrá:
Por tanto, el parámetro RES tomará el valor:
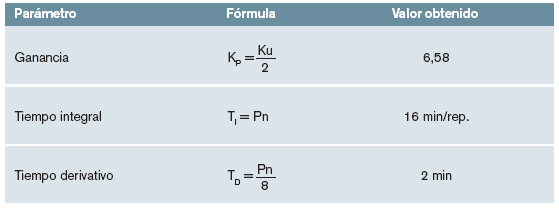
Se está en disposición de presentar los valores de ajuste de los parámetros PID del controlador. Estos se muestran en la tabla 1.
Ajuste de parámetros PID en lazo cerrado
Si se desea encontrar los valores de ajuste de los parámetros PID por el método de lazo cerrado para el sistema que se presentaba en la figura 1, ha de plantearse un procedimiento de trabajo radicalmente distinto al anterior. En este caso, el controlador habrá de funcionar en modo automático, esto es, regulando el proceso en todo momento. No obstante, antes de conectar el controlador se le habrán de anular tanto su acción integral (KI=0 o TI=¥), como su acción derivada (KD=0 o TD=0). También se le habrá de establecer el valor de la con-signa deseada, por ejemplo, 18,0 ºC.
Arrancado el sistema y el controlador regulando el damper de aire frío, se debe ajustar el potenciómetro de ganancia (o banda proporcional en su caso) a un valor tal que se obtenga una oscilación pequeña y sostenida de la variable de medida (este paso es sumamente importante). Si se parte con el damper cerrado desde una temperatura ambiente de, por ejemplo, 24,5 ºC, y el proceso evoluciona de manera correcta, es de esperar una respuesta parecida a la que se muestra en la figura 5. Aunque en la gráfica se ha dibujado así, la oscilación sostenida de la medida no tiene que producirse necesariamente en torno al valor de consigna.
El valor último de la ganancia (Ku) que ha mantenido la oscilación del proceso debe ser anotado. Este valor interviene en el cálculo de la ganancia que, finalmente, se establecerá en el controlador. Imaginemos que en el ejemplo Ku ha resultado ser 13.
Al analizar la curva de respuesta se observa que el periodo de la oscilación natural (Pn) es en este caso de 16 minutos. Este valor es fundamental, puesto que a partir de él se podrá determinar el resto de parámetros PID.
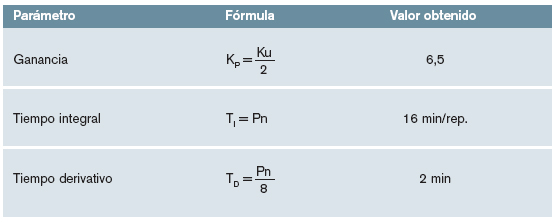
Se está en disposición de presentar los valores de ajuste de los parámetros PID del controlador, que se muestran en la tabla 2.
Consideraciones finales
Mediante las técnicas de cálculo analizadas, se puede realizar un ajuste aceptable de los parámetros PID del controlador. Sin embargo, en bastantes ocasiones los valores obtenidos deben ser corregidos dependiendo de la dinámica del sistema y de las características del control. En cualquier caso, los valores obtenidos constituyen una aproximación importante a los valores que, finalmente, se establezcan.
A continuación, se exponen una serie de consideraciones, útiles para acabar de ajustar los valores de los parámetros PID a los requerimientos del proceso.
perturbaciones con periodos superiores al periodo de oscilación Pn. Si el periodo de la perturbación es menor que Pn, el lazo puede resultar ingobernable.
a) Si se comparan las tablas 1 y 2 se obtiene una relación importante: Pn 4 tma. Dependiendo de la naturaleza del sistema, el periodo natural suele estar comprendido entre 2 tma y 4 tma. Si la respuesta del sistema se caracteriza por un predominio del tiempo muerto y pocos retrasos más, puede resultar conveniente disminuir TI de Pn a Pn/2 y rebajar KP a Ku/3 o Ku/4.
b) Si la curva de respuesta denota, únicamente, la presencia de tiempo muerto y retardo de integración, puede que convenga aumentar TI a 2Pn y mantener el valor de la ganancia.
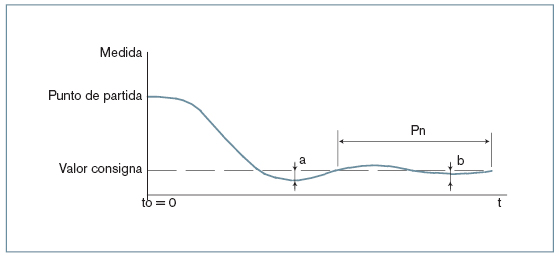
c) Si en el ejemplo analizado anterior-mente se ajustan los valores PID mediante los potenciómetros del controlador y se repite nuevamente el ensayo, cabe esperar que el sistema se comporte como muestra la figura 6. La calidad de sintonizado del lazo de control viene dada por la relación entre los valores a y b de la gráfica. El lazo de control se puede considerar ajustado cuando a/b = 4.
d) Al aumentar la acción integral, el sistema tiende a oscilar, pero con un periodo Pn mayor.
e) Ajustados los parámetros PID, el sistema regulará con eficacia frente a
f) La acción derivada se debe establecer con cautela, puesto que, si se le asigna un valor elevado, puede peligrar la estabilidad del sistema. Es efectiva cuando este presenta un cierto tiempo muerto, con la condición de que no sea dominante con relación a otros retrasos. Habitualmente, genera una disminución del periodo natural de entre el 10% y el 20%.
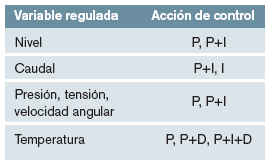
La elección del regulador no es crítica. La tabla 3 recoge las acciones de control que suelen poder ser combinadas para conformar la acción global de control de acuerdo con la naturaleza de la variable que regular.
Bibliografía
O’Dwyer A. Handbook of PI and PID Controller Tuning Rules, 2009, Ed. Imperial College Press.
Roca Cusidó A. Control de procesos, 1997. Ed. UPC.
W. St. Clair D. Controller Tuning and Control Loop. 1998, Ed. Straight-Line Control Company, Inc.