
Diseño de un portico nivelador para colocacion de vías en placa
RESUMEN
De acuerdo con los parámetros que marcan las normas ferroviarias para líneas de alta velocidad, a través de un pórtico nivelador se ejecutan las operaciones necesarias para la colocación de vías en las placas. Este pórtico nivelador realiza las operaciones de carga y descarga normales para este tipo de máquinas y, además, posiciona en altura, peralte y eje longitudinal la placa que va a soportar la vía de ferrocarril, de acuerdo con los datos topográficos. El equipo es autómata y recibe por radiofrecuencia las órdenes necesarias para funcionar, asegurándose una alta calidad y seguridad en todas las operaciones.
Recibido: 23 de junio de 2010
Aceptado: 27 de abril de 2011
Palabras clave
Trenes, alta velocidad, maquinaria, traviesas
ABSTRACT
According to the parameters that set the standards for high-speed railway lines, a levelling gantry permits the execution of the operations necessary for the laying of rails on the track bed. This levelling gantry performs the loading and unloading normal for this type of equipment and additionally position for height, depth and longitudinal axis the slab which will support the track, in accordance with the survey data. The unit is fully automated and receives the commands necessary for its operation by radio frequency, ensuring a high level of quality and safety in its operation.
Received: June 23, 2010
Accepted: April 27, 2011
Keywords
Trains, high speed, machinery, sleepers
Cuando la Asociación Nacional de Fabricantes de Traviesas para Ferrocarril (Aftrav) se impuso como meta el desarrollo de una vía en placa netamente española, se crearon dos modelos o sistemas, VPP (pretensada y postensada) (figura 1) y el sistema DEDRA de hormigón armado (figura 2). Una vez desarrollados estos sistemas y con la fabricación de elementos para las primeras pruebas, surgió la necesidad de contar con un equipo, que descargase estos elementos y que también sirviese para posicionarlos exactamente, permitiendo su nivelación, alineación y rotación sobre un eje central, y al estar las maniobras totalmente robotizadas evitar los errores humanos de su manipulación.
Para el diseño y fabricación del pórtico se han tenido en cuenta cuatro directrices principales:
1. Los parámetros que marcan los citados modelos de vía en placa.
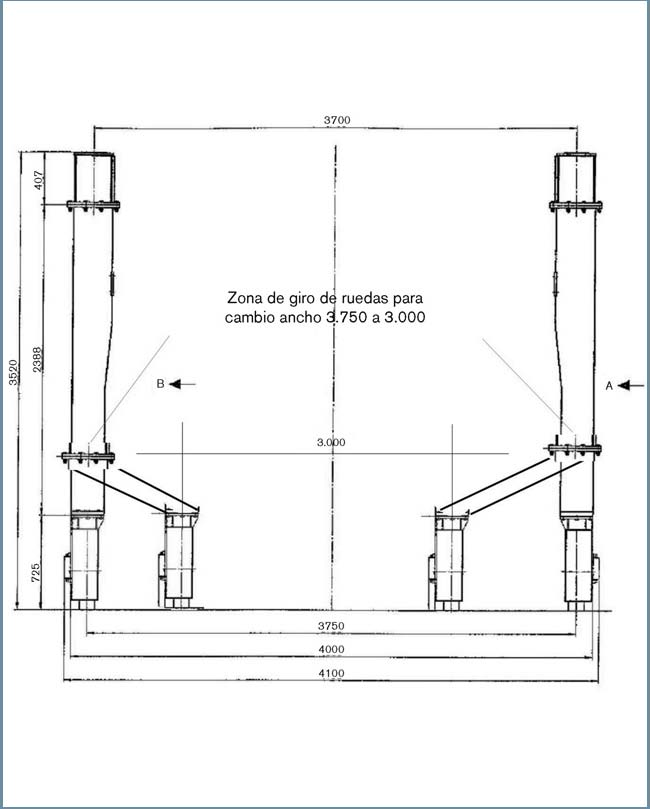
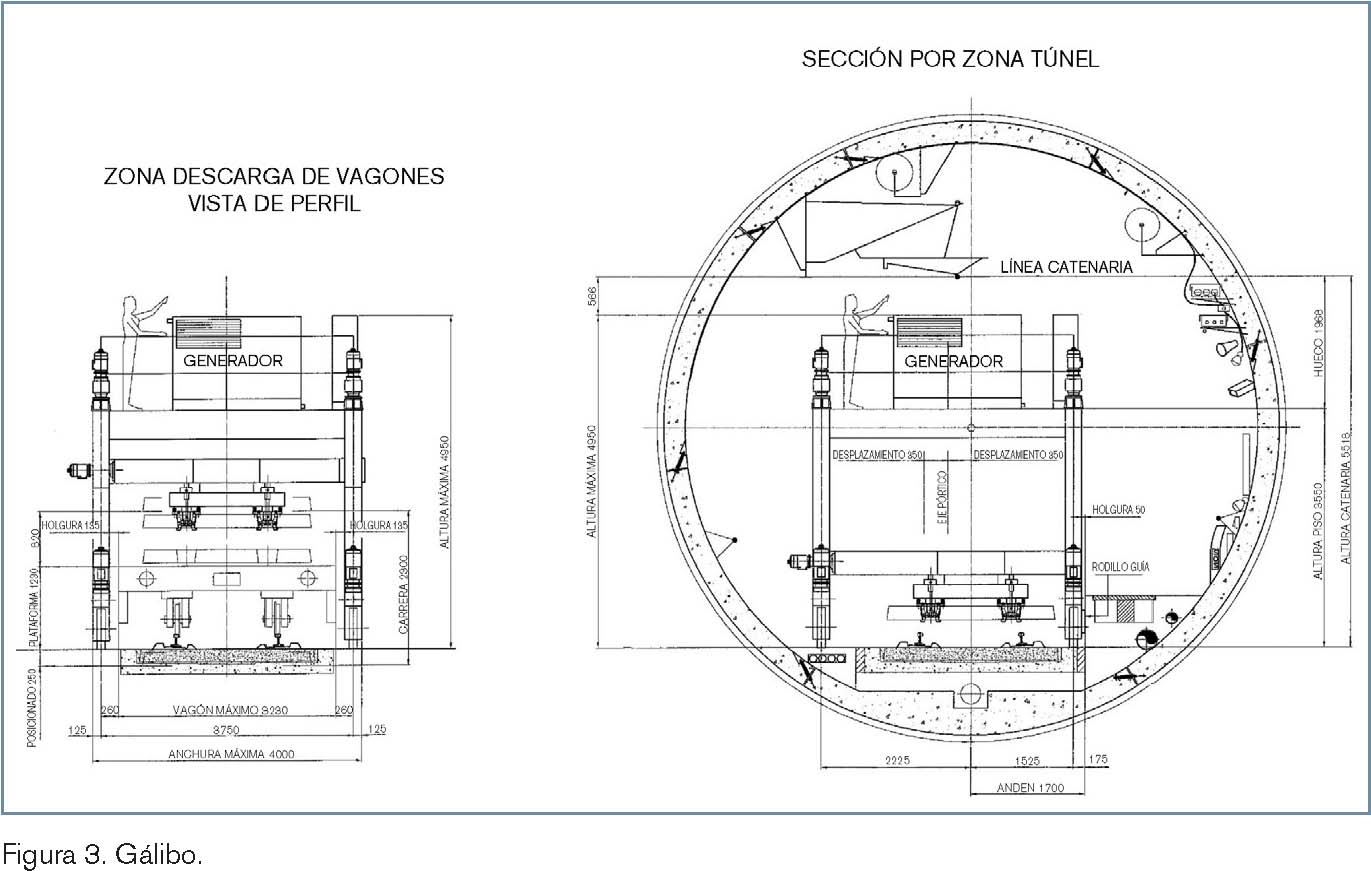
2. El gálibo disponible, para trabajar bajo la catenaria de la sección de túnel en líneas de alta velocidad (figura 3).
3. Una luz suficiente para descargar las placas cuando se reciban en obra, en camión, o en cualquier tipo de plataforma ferroviaria, suministrada por Renfe Operadora.
4. Desplazamiento de las patas del pórtico para adecuar el ancho de rodadura a la plataforma existente (figura 4).
El pórtico nivelador puede utilizarse allá donde exista una presolera de hormigón o asfalto.
Se ha diseñado para que pueda ser transportado sin necesidad de desmontarlo, lo que agiliza su presencia en cualquier punto de la red ferroviaria (figura 5). Con este fin se ha concebido una cuna versátil de anclaje a plataforma de camión sobre la que tras apoyarse y elevar sus ruedas, el pórtico queda en posición de transporte.
Si bien tras abatirse las barandillas de seguridad de mantenimiento, se satisface la normativa sobre gálibos de vehículos en carretera, es necesario obtener un permiso de circulación debido a la anchura del conjunto.
Además de descargar las placas e introducirlas en la zona del túnel que se desee, el pórtico nivelador tiene una funcionalidad añadida que le permite regular su posición con una precisión milimétrica, acorde a la exactitud requerida en la colocación de este tipo de elementos.
El pórtico se desplaza apoyado sobre cuatro ruedas, dos motrices y dos directrices, accionadas mediante un motor eléctrico dotado de ajuste de marcha y una gran capacidad de regulación. Las ruedas son capaces de soportar la carga en funcionamiento sobre superficies de hormigón o asfalto, relativamente niveladas.
Tanto en el interior de un túnel como en una plataforma de cualquier obra, la traslación del pórtico puede soportar con su carga pendientes de hasta el 4%, a una velocidad máxima de 60 m/min.
Debido a que el peso máximo de la placa VPP proyectada por Aftrav, incluida fijación, es de 6.500 kg el pórtico nivelador soporta una carga máxima de 7.000 kg.
El pórtico nivelador es una máquina totalmente autómata que funciona gracias a un generador eléctrico de 20 KVA, movido a su vez por un motor de combustión interna totalmente insonorizado.
La velocidad de cada movimiento es controlada por variadores de frecuencia de última generación, y realizada por motores-frenos especiales, dotados de encoder y ventilación forzada.
Las órdenes para el funcionamiento del pórtico se realizarán mediante equipo de radio (figura 6); lográndose el control y la regulación de los movimientos gracias a la variación de frecuencia.
Todos sus accionamientos se efectúan sin necesidad de ninguna central hidráulica, por medio de sistemas eléctricos autorregulados que permiten un control preciso de todos los movimientos, utilizando husillos de bola, reductores y cadenas con mando por radiofrecuencia.


Además, para los movimientos de elevación y regulación transversal, el sistema permite varias velocidades de funcionamiento en las maniobras de aproximación; así como velocidades superlentas, del orden de fracciones de milímetros por segundo, al efectuar el reglaje en posición de la placa. El programa de funcionamiento incluye órdenes para que una vez recibidos los ajustes de topografía, el pórtico se mueva con las órdenes recibidas.


Finalmente, gracias a que se ha previsto una toma de energía externa a cualquier equipo de suministro eléctrico, el pórtico nivelador puede continuar con los trabajos comenzados incluso ante un fallo o paralización de su equipo generador autónomo.


A continuación, se describen las fases de funcionamiento del pórtico para colocar la placa en la vía.
Maniobras con la placa
En el trabajo del pórtico con la placa distinguimos dos tipos de maniobras: manipulación y colocación.
La maniobra de manipulación recoge las operaciones de carga y descarga de la placa en camiones o plataformas de ferrocarril, el traslado de la misma por la obra o dentro del túnel y su posicionamiento aproximado en la zona de colocación definitiva.
Una vez allí, se procede a la maniobra de colocación, en la que se realiza el posicionamiento preciso de la placa en su emplazamiento final con tolerancias muy estrechas.
Bloqueo de la placa
Para la recogida de la placa, el pórtico nivelador está dotado de un spreader formado por dos elementos: uno fijo y otro regulable (figura 7).
El elemento fijo va suspendido del pórtico por medio de tres husillos de bolas, y de él suspende el elemento inferior que recoge la placa. Su posición puede regularse gracias a dos husillos de bolas horizontales que confieren una gran movilidad, tanto para desplazamientos horizontales como para movimientos de giro sobre su quicio central.
El spreader dispone de cuatro garras accionadas independientemente por un actuador eléctrico que recoge la placa por la parte inferior, sujetándola por los orificios de inyección del mortero autonivelante.
Por la parte superior, el elemento suspensor del spreader mantiene la placa bloqueada, de manera que al levantarla se mantenga perfectamente rígida.
Es importante resaltar que, en el momento de la deposición, para desenganchar las mordazas debe quedar un hueco mínimo de 40 mm, entre placa y presolera, espacio que posteriormente será rellenado con el mortero autonivelante.
Elevación del conjunto
El conjunto spreader-placa, formando un todo, se suspende de tres husillos de bolas articulados que cuenten con accionamientos independientes, lo que nos per-mite regularlos con gran precisión.
El spreader de suspensión está compuesto por dos bastidores independientes conectados entre sí, y es el inferior el que recoge la placa.
Este bastidor permite un desplazamiento de 350 mm a cada lado del eje del pórtico, lo que facilita colocarlo centrado sobre el camión o vagón para recoger la placa (figura 8), y posteriormente, ya en el túnel, descentrarlo para depositarla en su posición, salvando así el obstáculo del andén situado a 1.700 mm del eje.
Operaciones de manipulación de la placa
Iniciamos la operación de manipulación de la placa dándole al pórtico nivelador la orden de posicionamiento automático.
El pórtico dispone de tres sensores de ultrasonido que controlan la posición del spreader sobre la placa, de manera que se sitúe paralelo a ella en altura, quedando cada uno de los husillos aproximadamente a 500 mm.
A continuación, y con ayuda de sus detectores fotoeléctricos, el pórtico se centra sobre la placa longitudinalmente.
Una vez recibida la confirmación de posicionamiento correcto se centra transversalmente mediante cuatro contactos de infrarrojo situado en los extremos de spreader.
Completado el posicionamiento del pórtico se encienden los indicadores luminosos que autorizan el descenso del spreader para recoger la placa.
Estos movimientos se realizan a una velocidad de 0,5 m/min.
Gracias a los cuatro palpadores de que dispone, en cuanto el pórtico nivelador detecta el contacto con la placa, se detiene instantáneamente el movimiento descendente del spreader. En ese momento se habilita el cierre y apertura de las garras prensiles, lo que permite asir o soltar la placa. Estos movimientos se realizan a una velocidad máxima de 1 m/min.
Por motivos de seguridad se ha previsto que para poder funcionar, todas las garras deban estar abiertas o cerradas.
Con la placa ya sujeta se procede a su elevación. Para el control de la posición de spreader y garras, el pórtico nivelador cuenta con tres indicadores luminosos cuyos estados indican: spreader apoyado, garras abiertas y garras cerradas.
Como medida de seguridad que imposibilite que pueda soltarse mientras permanece suspendida, las garras solo actúan cuando el spreader está apoyado en la placa.
Un vez situada en una posición aproximada a la de colocación, se apoya el conjunto placa-spreader mediante los tirafondos acoplados en la placa que se ajustan para dejar una holgura aproximada de 40 mm entre fondo de placa y presolera y se da la orden de abrir garras, soltándose entonces la placa. Tras ello se traslada el pórtico para comenzar una nueva maniobra con otra placa.
Si está realizado el replanteo y tenemos las órdenes de posicionamiento exacto en vía, continuamos con las operaciones de regulación.


Operaciones de regulación de posicionamiento de la placa
Estando el conjunto spreader-placa situado en su lugar aproximado de emplazamiento, se procede a identificar de modo preciso los desplazamientos, tanto en altura como orientación y giro, necesarios para el posicionamiento exacto de la placa.
Para ello, desde el mismo lugar de control, se empleará el mando por radio o en la pantalla táctil instalada para actuar sobre los husillos de elevación, para, mediante pulsaciones de décimas de mm controlar así la posición de cada una de las cuatro esquinas.
Podrá bascularse la placa sobre los ejes formados por dos de los husillos, y subir o bajar cualquier punto, con la precisión deseada, accionando el tercero.
Al mismo tiempo y con pulsaciones iguales a las anteriores, y empleando los husillos transversales, se podrá desplazar toda la placa, o bien rotarla sobre un punto central, lográndose así un posicionamiento exacto.
Conclusiones
Por lo expuesto, en Atrav consideramos que los elementos de regulación y control que incorpora este pórtico nivelador marcarán un antes y un después en este tipo de maquinaria. Y es que, gracias a su revolucionario diseño, podremos situar la placa sobre un punto determinado con una precisión milimétrica, cumpliendo con los estrictos parámetros de garantía y tolerancia que marcan los pliegos de las Administraciones ferroviarias para este tipo de vía y, además, permitirá una gran economía de esfuerzo y movimientos y ahorro de tiempo y precisión en el posicionamiento, que revertiría sin duda en unas mayores cotas de calidad.
Todas las pruebas de funcionamiento y validación han sido realizadas a plena satisfacción en el túnel de Horcajada de la nueva línea de Alta Velocidad Madrid-Valencia (figuras 9 y 10).
Bibliografía
Aenor (1996). UNE-EN 1037:1996. Seguridad de las máquinas. Prevención de una puesta en marcha intempestiva.
Aenor (1997). UNE-EN 1050:1997 Seguridad de las máquinas. Principios para la evaluación del riesgo.
Aenor (1977). Norma NRV 3-1-2.1. Traviesas. Traviesas monobloque de hormigón. Normas Renfe Vía. 1ª edición: 15 de diciembre de 1997.
Aenor (1999). UNE-EN 12077-2:1999 Seguridad de las grúas. Requisitos de salud y seguridad. Parte 2ª: Dispositivos limitadores e indicadores.
Aenor (1999). UNE-EN 60204-1:1999. Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1: Requisitos generales.
Aenor (2001). UNE-EN 60204-32:2001. Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 32: Requisitos para aparatos de elevación.
Aenor (2003). UNE-EN 13230-1. Aplicaciones ferroviarias. Vía. Traviesas de hormigón para plena vía y aparatos. Parte 1: Requisitos generales (noviembre 2003).
Aenor (2004). UNE-EN ISO 12100-1:2004. Seguridad de las máquinas. Conceptos básicos, principios generales para el diseño. Parte 1: Terminología básica, metodología (ISO 12100-1:2300).
Aenor (2004). UNE-EN ISO 12100-2:2004. Seguridad de las máquinas. Conceptos básicos, principios generales para el diseño. Parte 2: Principios técnicos. (ISO 12100-2:2300).
Aenor (2004). UNE-EN 13848-1:2004. Aplicaciones ferroviarias. Vía. Calidad de la geometría de vía. Parte
1: Caracterización de la geometría de vía (diciembre 2004)
Aenor (2007). UNE-EN 13231-1. Aplicaciones ferroviarias. Vía. Recepción de trabajos. Parte 1: Trabajos en vía sobre balasto. Vía general (julio 2007).
BOE (1992). Real Decreto 1435/1992 de 27 de noviembre, por el que se dictan disposiciones de aplicación a la directiva del Consejo 89/392/CEE, relativa a la aproximación de las legislaciones de los Estados miembros sobre máquinas, y Real Decreto 56/1995, que modifica parcialmente el RD 1435/1992.
BOE (1997). Real Decreto 1215/1997, de 18 de julio, por el que se establecen las disposiciones mínimas de seguridad y salud para la utilización por los trabajadores de los equipos de trabajo.
BOE (1997). Real Decreto 1627/1997, de 24 de octubre, por el que se establecen las disposiciones mínimas de seguridad y salud en las obras de construcción.
BOE (2006). Real Decreto 355/2006, de 29 de marzo, sobre interoperabilidad del sistema ferroviario transeuropeo de alta velocidad.
Consejo CE (1973). Directiva de Baja Tensión 73/23/CEE
Consejo CE (1989). Directiva de Compatibilidad Electromagnética 89/336/CEE.
Consejo UE (1996). Directiva 96/48/CE del Consejo, de 13 de julio de 1996, relativa a la interoperabilidad del sistema ferroviario transeuropeo de alta velocidad, modificada por la Directiva 2004/50/CE del Parlamento Europeo y del Consejo, de 29 de abril.
Consejo UE (1998). Directiva de máquinas 98/37/CE.
Comisión Europea (2002). ETI relativa al subsistema Infraestructura del sistema ferroviario transeuropeo de alta velocidad, decisión de la comisión 2002/732/CE de 30 de mayo de 2002.
FEM (1998). Norma FEM 1001, edición 1987 y actualización de 1998. Aparatos de elevación, reglas de cálculo. Federation Europeene de la Manutention.
Norma ET 03.360.571.8 «Traviesas monobloque de hormigón pretensado».
Norma ET 03.360.580.9. Sistemas de vía sobre base de hormigón y tacos prefabricados. (1ª edición, 01/12/2000).